
Sau bước xác định mô hình thu thập dữ liệu (đã trình bày ở P1: Lựa chọn mô hình dữ liệu), để sử dụng phần mềm PIX4Dmapper thành lập bản đồ mang lại chất lượng cao, cần tính toán độ cao, tốc độ bay chụp cộng với hướng cảm biến, tham chiếu địa lý… phù hợp. Cụ thể hơn, hãy cùng Đất Hợp tìm hiểu qua bài viết dưới đây.
Yêu cầu cấu hình máy ảnh, ống kính, quang phổ cho dữ liệu vào phần mềm PIX4Dmapper
Nếu bạn nghĩ rằng để sử dụng phần mềm PIX4Dmapper cần phải có thiết bị khủng để thu thập dữ liệu, bạn đã hoàn toàn sai. Vì phần mềm PIX4Dmapper đã được nhà sản xuất PIX4D thiết kế nó với khả năng ưu hóa cực kỳ cao, có thể sử dụng dữ liệu ảnh từ đa loại thiết bị, đa ống kính và đa quang phổ…
Phần mềm PIX4Dmapper có thể xử lý hình ảnh được chụp bằng bất kỳ loại máy ảnh nào:
- Máy ảnh Compact.
- Máy ảnh DSLR.
- Máy ảnh cảm biến lớn.
- Camera hành trình.
- Thiết bị bổ trợ camera.
- Máy ảnh đa phổ.
- Máy ảnh siêu phổ.
- Máy ảnh nhiệt.
- Smart Phone.
- Máy ảnh toàn cảnh.

Hình 1. Các loại máy ảnh sử dụng để xuất dữ liệu ảnh cho PIX4Dmapper.
Bất kỳ loại ống kính nào:
- Phối cảnh (bất kỳ FOV nào).
- Fisheye (FOV siêu rộng).
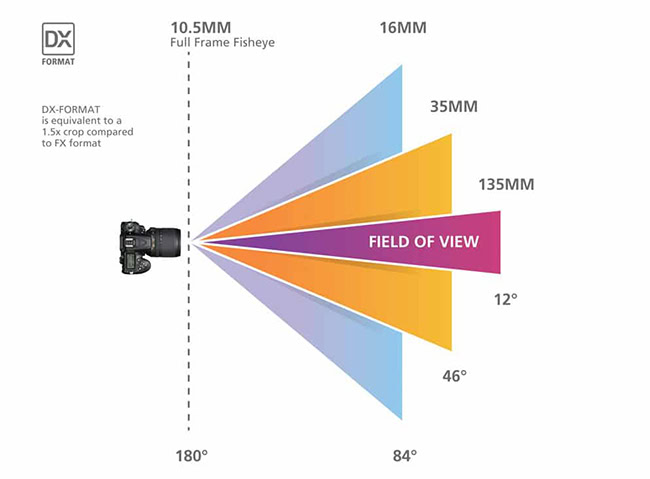
Hình 2. Mọi FOV được PIX4Dmapper sử dụng để xử lý ảnh.
Bất kỳ nền tảng bay chụp nào:
- Máy bay không người lái.
- Máy bay dân dụng.
- Phương tiện giao thông đường bộ.
- Máy ảnh cầm tay.
Bất kỳ quang phổ nào:
- Ảnh RGB.
- Ảnh NIR, Red Edge (sử dụng cho nông nghiệp).
- Ảnh nhiệt.
- Ảnh đa quang phổ.
>>> Xem chi tiết: Phần mềm xử lý ảnh UAV PIX4Dmapper
Hướng dẫn tính toán độ cao, tốc độ bay chụp; hướng cảm biến; tham chiếu địa lý trước khi thu thập dữ liệu
– Tính toán độ cao bay chụp
Độ phân giải ảnh mặt đất (GSD) là khoảng cách giữa 2 pixel ảnh chụp liên tiếp trên mặt đất. GSD ảnh hưởng đến độ chính xác và chất lượng kết quả cuối cùng của dự án, cũng như các chi tiết trực quan trong ảnh trực giao.
Chiều cao bay chụp H được tính toán và phụ thuộc vào tiêu cự máy ảnh, chiều rộng của cảm biến máy ảnh (mm) và độ phân giải của cảm biến ảnh (pixel).
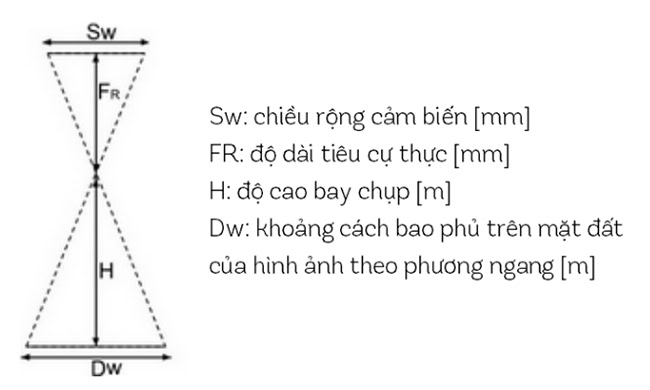
Hình 3. Ký hiệu các thông số tính toán độ cao bay chụp.
Trên thực tế: H / FR = Dw / Sw
Suy ra, chiều cao bay chụp H được tính bằng công thức:
H = ( Dw * FR ) / Sw (1)
Khoảng cách bao phủ trên mặt đất của hình ảnh theo phương ngang được tính bằng công thức:
Dw = ( imW * GSD ) / 100 (2)
Trong đó:
- Dw là khoảng cách bao phủ trên mặt đất của hình ảnh theo phương ngang (m).
- imW là chiều rộng hình ảnh (pixel).
- GSD là độ phân giải hình ảnh yêu cầu (cm/pixel).
Kết hợp phương trình (1) và (2), độ cao bay chụp được tính bằng công thức:
H = ( imW * GSD * FR ) / (Sw * 100) (3)
>>> Xem thêm: Quy trình Thành lập bản đồ bằng Phương pháp bay chụp không ảnh (UAV Photogrammetry)
– Tính toán tốc độ bay chụp cho độ chồng lớp phù hợp
Độ chồng lớp hình ảnh phụ thuộc vào tốc độ bay chụp của UAV, GSD và độ phân giải của máy ảnh.
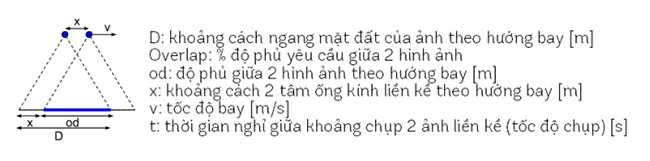
Hình 4. Ký hiệu các thông số tính toán tốc độ bay chụp.
Từ hình 4, người ta cho ra công thức:
od = overlap * D (4)
x = D – od (5)
t = x / v (6)
– Xác định hướng cảm biến
- Định hướng máy ảnh cho chiều rộng cảm biến vuông góc với hướng bay
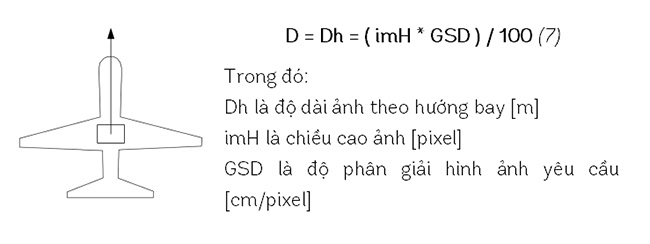
Hình 5. Chiều rộng cảm biến vuông góc với hướng bay.
Kết hợp phương trình (4) và (7) vào phương trình (5), ta có:
x = Dh – overlap * Dh
x = Dh * (1 – overlap)
x = ( ( imH * GSD ) / 100 ) * ( 1 – overlap ) (8)
Kết hợp phương trình (6) và (8):
t = x / v = ( ( imH * GSD ) / 100 ) * ( 1 – overlap ) / v (9)
Ví dụ: Để đạt được độ phủ là 75%, GSD là 5 cm/pixel, giả sử chiều rộng của cảm biến ảnh là 4000 pixel, tốc độ máy bay là 30 km/h (~8,33 m/s), thì tốc độ hình ảnh được tính:
t = ( ( 4000 * 5) / 100 ) * ( 1 – 0,75 ) / 8,33 = 6 [s]
- Định hướng máy ảnh cho chiều rộng cảm biến song song với hướng bay
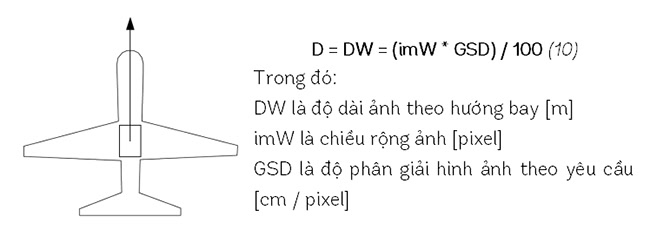
Hình 6. Chiều rộng cảm biến song song với hướng bay.
Kết hợp phương trình (4) và (10) vào phương trình (5), ta có:
x = DW – overlap * DW
x = DW * ( 1 – overlap )
x = ( ( imW * GSD ) / 100 ) * ( 1 – overlap ) (11)
Kết hợp phương trình (6) và (11), ta có:
t = x / v = ( ( imW * GSD ) / 100 ) * ( 1 – overlap ) / v (12)
– Tham chiếu địa lý hình ảnh
Phần mềm PIX4Dmapper có khả năng xử lý hình ảnh không có tham chiếu địa lý, nhưng nhà sản xuất vẫn khuyến cáo người dùng sử dụng vị trí địa lý để cho ra được kết quả chính xác và nhanh chóng. PIX4Dmapper không yêu cầu các tham số IMU, và các tham số định hướng ảnh được tính toán tự động trong quá trình xử lý.
- Đối với hình ảnh không được tham chiếu địa lý
Phần mềm PIX4Dmapper có thể xử lý hình ảnh không có tham chiếu địa lý sẵn. Khi hình ảnh không có tham chiếu địa lý, phần mềm PIX4Dmapper cần được thiết lập những thông số kỹ thuật để định vị, xác định tỉ lệ và định hướng chính xác cho mô hình. Điểm khống chế mặt đất (GCP) sẽ định vị mô hình ở vị trí chính xác, định vị đúng tỷ lệ và hướng cho mô hình. Nếu không sử dụng GCP, phần mềm PIX4Dmapper vẫn có những công cụ để xác định tỷ lệ và định hướng riêng biệt.
- Đối với hình ảnh có dữ liệu vị trí bằng máy ảnh tích hợp GPS
Hầu hết các nhà sản xuất máy ảnh nổi tiếng trong lĩnh vực bay chụp khảo sát đều phát hành các dòng máy ảnh có tích hợp GPS như Panasonic, Sony hay Canon. Các dòng máy ảnh này tự động lưu dữ liệu GPS dưới dạng dữ liệu EXIF của hình ảnh.
Phần mềm PIX4Dmapper thông qua đó để nhận dữ liệu vị trí của hình ảnh và đưa vào phần mềm xử lý.
- Đối với hình ảnh có dữ liệu vị trí bằng bộ ghi GPS rời
GPS logger là thiết bị gọn nhẹ, dễ được lắp đặt trên UAV trong quá trình bay chụp để ghi nhận thông tin vị trí cho hình ảnh. Nó cho phép ghi nhận các giá trị kinh độ, vĩ độ, độ cao cho từng vị trí trong suốt quá trình bay chụp. Các giá trị này có thể được lưu theo định dạng tệp có thể xử lý trong phần mềm PIX4Dmapper, hoặc hiệu chỉnh trước khi đưa vào xử lý.
GPS logger được nhà sản xuất khuyến nghị sử dụng là các loại RTK GPS có độ chính xác từ 2 đến 4 cm với tốc độ xử lý cao, qua đó không cần GCP để cải thiện độ chính xác.
Hình 7. Bộ ghi GPS rời – GPS logger.
Phần mềm PIX4Dmapper được đánh giá là có hiệu quả trong việc thành lập bản đồ và mô hình 3D chính xác cao. Để tìm hiểu thêm về chức năng thành lập bản đồ bằng ảnh chụp bằng phần mềm PIX4Dmapper, hãy liên hệ ngay Công ty TNHH Đất Hợp qua HOTLINE 0903 825 125 để được hỗ trợ nhanh nhất!
>>> Xem lại Phần 1: Mô hình dữ liệu Thành lập bản đồ bằng ảnh chụp từ A – Z bằng phần mềm PIX4Dmapper
Mọi thông tin xin vui lòng liên hệ:

CÔNG TY TNHH ĐẤT HỢP
Địa chỉ: Số 2, Đường số 4, Khu nhà ở Vạn Phúc 1, P. Hiệp Bình Phước, TP. Thủ Đức, TP. HCM
Tel: (028).3.6208.606
Mobile: 0903 825 125
Email: cskh@dathop.com.vn
Website: https://dathop.com/ – https://dathop.com.vn/
Fanpage: https://www.facebook.com/congtydathop




