Phần mềm xử lý ảnh UAV PIX4Dmapper đến từ thương hiệu PIX4D (Thụy Sĩ), là phần mềm nội nghiệp có khả năng xử lý dữ liệu ảnh thu thập được từ các thiết bị bay không người lái (UAV), và tất cả hình ảnh được chụp từ mọi góc độ, mọi nền tảng trên không hoặc trên mặt đất, có người lái hoặc không người lái. Dữ liệu đầu ra của PIX4DMapper là cơ sở để thành lập bản đồ, đặc biệt là bản đồ 3D,.. chất lượng cao. PIX4DMapper giúp hoàn thiện xử lý ảnh, từ thu thập dữ liệu đến kiểm soát chất lượng đầu ra và chia sẻ dữ liệu. Phần mềm còn có khả năng kết hợp với hệ thống các phần mềm khác trong hệ sinh thái của PIX4D như: PIX4Dcloud…
Phần mềm PIX4Dmapper nổi tiếng ở Thụy Sĩ và nhiều khu vực trên thế giới với khả năng xử lý ảnh để thành lập bản đồ từ các thiết bị bay không người lái. Ưu điểm của phần mềm này là có thể sử dụng hình ảnh từ bất kỳ máy ảnh nào để xử lý, từ những máy ảnh nhỏ gọn, DSLR, ảnh nhiệt, đa kính, mắt cá, 360°, khung hình lớn, v.v.) ở định dạng .jpg hoặc .tiff.
KHẢ NĂNG ỨNG DỤNG CỦA PHẦN MỀM XỬ LÝ ẢNH UAV PIX4Dmapper
Phần mềm xử lý ảnh PIX4Dmapper được PIX4D phát triển trong nhóm phần mềm chuyên cho việc thành lập bản đồ và mô hình 3D. Do đó, PIX4Dmapper được ứng dụng trong nhiều lĩnh vực và hạng mục như:
Khảo sát địa hình chung: Đối với các dự án không bao gồm rừng, tuyết, hồ, cánh đồng nông nghiệp và / hoặc các địa hình khó tái tạo khác.
Khảo sát rừng và thảm thực vật rậm rạp: Đối với dự án có diện tích rừng bao phủ hoặc thảm thực vật rậm rạp.
Khảo sát địa hình bằng phẳng, có ruộng: Đối với địa hình bằng phẳng có nội dung trực quan đồng nhất như ruộng nông nghiệp.
Mô phỏng tòa nhà: Tạo mô hình 3D của các tòa nhà.
Thành lập bình đồ: Dành cho các khu vực cần thể hiện đường đồng mức.
Khảo sát chuyến bay: Đối với các dự án có hình ảnh được thực hiện bằng cách sử dụng nhiều chuyến bay.
Mô phỏng thành phố (mặt tiền có thể nhìn thấy): Lập mô hình 3D về các khu vực đô thị.
Mô phỏng nội thất 3D: Tạo mô hình 3D cho nội thất của các tòa nhà.
Mô phỏng tổng hợp: Dành cho các bộ dữ liệu kết hợp (nội thất / ngoại thất và / hoặc trên không / trên mặt đất và / hoặc nadir / xiên).
Mô phỏng địa vật 3D: Mô phỏng hình ảnh 3D các đối tượng đặc biệt (tháp điện, tuabin gió, đường hầm, v. v.).
Trường hợp đặc biệt: Khảo sát địa hình tuyết, cát và bề mặt nước (đại dương, hồ, sông, v.v.).
TÍNH NĂNG NỔI BẬT CỦA PHẦN MỀM XỬ LÝ ẢNH UAV PIX4Dmapper
Sử dụng quy tắc chồng lớp ảnh để cho ra dữ liệu chính xác
Pix4Dmapper là phần mềm xử lý hình ảnh dựa trên việc tự động tìm ra hàng nghìn điểm chung giữa các hình ảnh. Mỗi điểm đặc trưng được tìm thấy trong một hình ảnh được gọi là một Keypoint. Khi 2 Keypoint trên 2 hình ảnh khác nhau tương thích, chúng là Keypoint khớp nhau. Mỗi nhóm các Keypoint được kết hợp chính xác sẽ tạo ra một điểm 3D.
Khi có độ tương thích cao giữa 2 hình ảnh chồng lớp, khu vực xử lý sẽ lớn hơn, đồng nghĩa với việc có nhiều Keypoint hơn, càng dễ tính toán chính xác vị trí các điểm 3D hơn. Do đó, quy tắc chính khi sử dụng máy bay không người lái với phần mềm Pix4Dmapper là duy trì độ chồng lớp cao giữa các hình ảnh, nghĩa là đảm bảo thời gian nghỉ giữa 2 ảnh chụp sao cho khoảng cách tâm giữa 2 ảnh không chênh lệch quá lớn.
Hoàn thiện quy trình xử lý ảnh với thiết bị bay không người lái UAV
Phần mềm xử lý ảnh UAV PIX4Dmapper giúp hoàn thiện quy trình làm việc trực quan cho người dùng, từ thu thập dữ liệu hình ảnh đến kiểm soát chất lượng dữ liệu đầu ra và chia sẻ dữ liệu:
–Thu thập hình ảnh: Từ ảnh RGB, ảnh nhiệt hoặc đa ảnh bằng bất kỳ máy ảnh hoặc máy bay không người lái nào.
– Số hóa: Các thuật toán quan trắc ảnh của phần mềm PIX4Dmapper biến đổi hình ảnh mặt đất hoặc hình ảnh trên không trong bản đồ kỹ thuật số và mô hình 3D. Xử lý liền mạch các dự án trên máy tính bằng phần mềm xử lý ảnh UAV PIX4Dmapper hoặc hoặc kết hợp với PIX4Dcloud để xử lý trực tuyến.
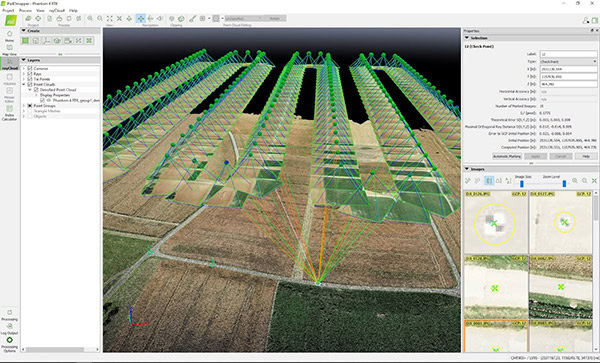
– Điều khiển: Sử dụng chất lượng của quan trắc ảnh trong môi trường rayCloud (công cụ kết hợp các điểm ảnh vào một môi trường 3D) để đánh giá, kiểm soát và cải thiện chất lượng của dự án. Sử dụng báo cáo chất lượng để xem trước các kết quả đã tạo, chi tiết hiệu chuẩn và nhiều chỉ số chất lượng khác.
RayCloud trong PIX4Dmapper.
– Đo lường và kiểm tra: Đo chính xác khoảng cách, diện tích và thể tích.
– Cộng tác và chia sẻ: Hợp lý hóa giao tiếp dự án và làm việc theo nhóm. Chia sẻ có chọn lọc, đảm bảo an toàn dữ liệu và thông tin chi tiết về dự án với nhóm, khách hàng và nhà cung cấp, sử dụng các định dạng tệp tiêu chuẩn.
Xử lý dữ liệu nâng cao, cung cấp kết quả chính xác với giải pháp quan trắc ảnh chuyên nghiệp
Pix4Dmapper cung cấp kết quả dữ liệu chính xác ở cấp độ khảo sát, độ chính xác có thể đạt đến từng centimet nhờ phân tích quang phổ. 1-2 pixel GSD theo hướng X, Y; 1-3 pixel GSD theo hướng Z. Với PIX4Dmapper, người dùng có thể kiểm soát hoàn toàn dự án bằng cách xác định một khu vực quan tâm, chọn các tùy chọn xử lý, thêm các điểm kiểm soát mặt đất hoặc chỉnh sửa các đám mây điểm, DSM, mô hình lưới và trực quan.
Thêm vào đó, quy trình làm việc cũng được tối ưu hóa hơn khi người dùng có thể sử dụng các mẫu mặc định trên PIX4Dmapper để xử lý tự động các dự án hoặc tạo riêng với các cài đặt tùy chỉnh để kiểm soát toàn bộ dữ liệu và chất lượng của chúng.
Lập bản đồ và mô hình 3D chính xác, hoàn toàn chỉ từ hình ảnh
PIX4Dmapper là phần mềm được tối ưu hóa cho công tác lập bản đồ và tạo mô hình 3D. Do đó, quy trình làm việc để tạo ra dữ liệu phục vụ cho công tác này được thiết kế rất rõ ràng:
– Phân loại đám mây điểm tự động: Phân biệt các đối tượng qua quá trình phân loại các chương trình dự đoán (thuật ngữ: Machine Learning: Classification).
– Làm phẳng và làm mịn bề mặt kỹ thuật số: Tạo bề mặt để cải thiện độ phẳng hoặc lấp đầy lỗ hổng ở những khu vực quan trọng.
–Dễ dàng đo bề mặt, khoảng cách và khối lượng: Đo ở chế độ 3D với chiều cao đế có thể điều chỉnh hoàn toàn.
–Kiểm soát độ chính xác của dự án: Chú thích và chỉnh sửa 2D và 3D GCP, điểm kiểm tra và MTP với độ chính xác cao nhất, sử dụng cả hình ảnh gốc và thông tin 3D cùng một lúc.
–Báo cáo chất lượng chi tiết: Đánh giá độ chính xác và chất lượng của các dự án một cách chi tiết.
Mô hình lưới kết cấu 3D được tạo ra từ dữ liệu của PIX4Dmapper.
Hỗ trợ xuất dữ liệu đầu ra với nhiều định dạng khác nhau, phục vụ cho nhiều mục đích công việc
Ngoài việc cung cấp dữ liệu đầu ra có chất lượng cao, PIX4Dmapper còn cho phép người dùng xuất dữ liệu sang nhiều định dạng khác để phục vụ cho công tác phân tích, báo cáo… về sau:
Dữ liệu xuất
Định dạng đầu ra
Đám mây điểm màu
.las, .laz, .ply, .xyz
Đám mây điểm đã phân loại
.las, .laz
Orthomosaic
GeoTiff (.tif), .kml
Đường Đồng mức
.shp, .dxf, .pdf
Mô hình địa hình kỹ thuật số (DTM) và Mô hình độ cao kỹ thuật số (DEM)
GeoTiff (.tif)
Mô hình bề mặt kỹ thuật số (DSM)
GeoTiff (.tif), .xyz, .las, .laz
Lập chỉ mục bản đồ
GeoTiff (.tif), .shp
Bản đồ nhiệt
GeoTiff (.tif)
Bản đồ phản ánh
GeoTiff (.tif)
Lưới kết cấu 3D
.ply, .fbx, .dxf, .obj, .pdf
BẢNG THÔNG SỐ TÍNH NĂNG CỦA PHẦN MỀM XỬ LÝ ẢNH UAV PIX4Dmapper
Dữ liệu đầu vào:
Tính năng
Lợi thế
Ảnh hàng không – Ảnh đứng, ảnh xiên và ảnh chụp từ thiết bị mặt đất
Xử lý hình ảnh được chụp từ mọi góc độ, mọi nền tảng trên không hoặc trên mặt đất, có người lái hoặc không người lái
Video ( định dạng mp4 hoặc avi)
Tự động trích xuất khung hình tĩnh từ video để tạo dự án
Mọi loại camera (compact, DSLR, thermal,
multispectral, fisheye, 360°, ảnh siêu lớn) ở định dạng .jpg hoặc .tiff
Xử lý hình ảnh từ bất kỳ máy ảnh nào, từ khung hình nhỏ đến lớn, từ máy ảnh cấp tiêu dùng đến máy ảnh chuyên dụng cao (tùy chọn tích hợp tiện ích bổ xung để hỗ trợ xử lý ảnh từ cảm biến siêu lớn 55 MP)
Hỗ trợ nhiều loại camera trong cùng một dự án
Tạo một dự án bằng cách sử dụng hình ảnh từ các máy ảnh khác nhau và xử lý chung
Hỗ trợ dữ liệu RTK/PPK+IMU
Cho phép sử dụng vị trí tâm ảnh chính xác để hiệu chuẩn nhanh hơn và chặt chẽ hơn
Hỗ trợ thiết bị bổ trợ camera (rig)
Cho phép xử lý hình ảnh bằng thông số thiết bị bổ trợ camera đã biết, từ nhiều camera được đồng bộ trên hệ thống
Nhập và chỉnh sửa điểm khống chế mặt đất
Nhập và chỉnh sửa điểm khống chế mặt đất để cải thiện độ chính xác tuyệt đối của dự án
Hệ thống tọa độ sẵn có hoặc tùy chỉnh ở hệ đơn vị imperial hoặc metric
Sử dụng hệ thống tọa độ đã có sẵn (theo EPSG code) hoặc hệ thống tọa độ tự định nghĩa
Hỗ trợ tham số định hướng ngoài của camera
Tối ưu hóa các thông số định hướng ngoài của máy ảnh từ các thông số đầu vào GPS và IMU
Hỗ trợ nhập dữ liệu Point Cloud
Cho phép nhập dữ liệu đám mây điểm từ các nguồn khác nhau, như LiDAR, để tạo mô hình số DSM và ảnh trực giao
Xử lý
Tính năng
Lợi thế
Các khung mẫu xử lý
Tự động xử lý và tạo sản phẩm theo khung mẫu có sẵn hoặc khung mẫu tùy biến
Kiểm tra nhanh kèm báo cáo chất lượng xử lý
Các khung mẫu xử lý nhanh để kiểm tra nhanh dữ liệu ngay tại hiện trường
Tự hiện chuẩn Camera
Tối ưu hóa các thông số định hướng trong máy ảnh, như độ dài tiêu cự, điểm chính ảnh và biến dạng ống kính
Sửa lỗi hiệu ứng của màn trập cuộn
Chỉnh sửa độ méo hình ảnh được chụp từ máy ảnh màn trập cuộn (GoPro, DJI Phantom,..) để duy trì độ chính xác khi bay nhanh và thấp
Tự động Bình sai tam giác ảnh không gian (AAT) và bình sai khối ảnh (BBA)
Tự động xử lý khi biết hoặc không cần tham số định hướng ngoài của camera (x, y, z, w, f, k)
Tự động xây dựng đám mây điểm Point Cloud
Xây dựng mô hình dữ liệu đám mây điểm 3D Point Cloud, sử dụng trong việc xây dựng mô hình số DSM hoặc mô hình lưới 3D Mesh
Tự động lọc và làm mịn đám mây điểm
Sử dụng các tùy chọn đặt trước để làm mịn và lọc dữ liệu đám mây điểm
Phân lớp dữ liệu đám mây điểm bằng công nghệ máy học Marchine Learning
Tự động phân loại đám mây điểm RGB thành năm nhóm: bề mặt đường trên mặt đất, thảm thực vật cao, các tòa nhà và các vật thể do con người tạo ra
Tự động trích xuất dữ liệu DTM/ DEM
Xóa các đối tượng trên mặt đất khỏi mô hình DSM và tạo mô hình độ cao số
Tự động hiệu chỉnh độ sáng và màu sắc
Tự động bù cho sự thay đổi độ sáng, độ chói và cân bằng màu của hình ảnh
Báo cáo xử lý
Xuất báo cáo để kiểm tra độ chính xác và chất lượng dự án
Gộp và chia nhỏ dự án
Gộp nhiều dự án thành một hoặc chia dự án lớn thành nhiều dự án nhỏ
Định nghĩa khu vực xử lý
Cho phép nhập vùng xử lý (.shb) hoặc vẽ vùng cần xử lý cụ thể để tạo sản phẩm nhanh hơn
Tùy chỉnh số lượng điểm đặc trưng ảnh Keypoints
Đặt giới hạn số lượng điểm đặc trưng ảnh để lọc nhiễu hoặc tăng tốc độ xử lý
Hỗ trợ đa xử lý bằng CPU và GPU
Tăng tốc độ xử lý bằng cách tận dụng sức mạnh của lõi và luồng CPU, GPU
Xử lý và hiệu chỉnh bức xạ ảnh
Hiệu chuẩn và hiệu chỉnh độ phản xạ hình ảnh của hình ảnh, xem xét độ sáng và ảnh hưởng của cảm biến
Chỉnh sửa Raycloud
Tính năng
Lợi thế
Trực quan hóa dự án
Đánh giá chất lượng tối ưu của các vị trí camera , đám mây điểm 3D và mô hình lưới
Chế độ điều hướng
Xem đám mây điểm 3D và lưới ở các chế độ xem tiêu chuẩn, trackball hoặc góc nhìn thứ nhất
Tùy chỉnh tỷ lệ
Tỷ lệ chính xác các dự án không có thông tin tọa độ, hoặc thông tin tọa độ không chính xác bằng cách xác định tỉ lệ theo một hoặc nhiều đoạn khoảng cách
Tùy chỉnh hướng
Định hướng các đối tượng không có thông tin tọa độ, hoặc thông tin tọa độ không chính xác bằng cách xác định hướng của một hoặc nhiều trục
Chỉnh sửa điểm khống chế mặt đất (GCP), điểm đặc trưng ảnh thủ công
Chú thích và chỉnh sửa điểm 2D và 3D GCP, điểm kiểm tra và MTP với độ chính xác cao nhất, sử dụng cả hình ảnh gốc và thông tin 3D cùng một lúc
Trực quan hóa sai số Ellipsoid
Đánh giá trực quan giá trị sai số vị trí được tính của GCP hoặc MTP
Tối ưu lại dự án
Tối ưu hóa lại các vị trí máy ảnh hoặc ghép lại hình ảnh dựa trên GCP và MTP để cải thiện việc khôi phục hình ảnh
Lớp phủ hình ảnh
– Carve: Xóa điểm khỏi đám mây điểm 3D và tạo bộ lọc dựa trên nội dung hình ảnh
– Mask: Xóa nền ảnh trực giao không sử dụng
– Global Mask: Bỏ các đối tượng xuất hiện trong tất cả các hình ảnh, như chân đỡ bay không người lái hoặc chân máy
Chỉnh sửa Point Cloud
Chọn, phân loại hoặc xóa các điểm khỏi đám mây điểm bằng các công cụ chọn
Tạo phép chiếu ảnh trực giao
Xác định mặt phẳng chiếu để tạo mô hình DSM và ảnh trực giao
Công cụ tạo đối lượng Polyline và bề mặt
– Công cụ chú thích và đo giá trị đường, bề mặt trên đám mây điểm
– Xác định chính xác vị trí điểm đỉnh từ nhiều ảnh gốc
Chỉnh sửa mô hình lưới 3D Mesh và mô hình DSM
Chú thích và tạo mô hình bề mặt trong dữ liệu đám mây điểm để làm phẳng hoặc lấp đầy các khoảng trống trong mô hình lưới và mô hình DSM
Phát hiện sai lệch trực quan
Phát hiện và trực quan hóa các điểm MTP / GCP không chính xác
Hiệu ứng xem hoạt ảnh bay qua
Mô phỏng lại quỹ đạo bay, hoạt ảnh bay trong thời gian thực và xuất dữ liệu
Quản lý khối lượng
Tính năng
Lợi thế
Tạo đối tượng cần tính khối lượng
Chú thích và đo tính khối lượng dựa trên mô hình DSM
Quản lý khối lượng đối tượng
Nhập và xuất dữ liệu khối lượng dựa trên vùng chọn .shp để dễ dàng quản lý khối lượng tại hiện trường
Hiệu chỉnh mặt chuẩn
Điều chỉnh mặt chuẩn tham chiếu để phù hợp với các dạng địa hình và đạt độ chính xác trên phép tính
Chỉnh sửa ảnh trực giao
Tính năng
Lợi thế
Chỉnh theo vùng
Tạo và chỉnh sửa vùng trên ảnh trực giao, chọn mảnh ảnh trực giao tốt nhất từ nhiều ảnh và kiểu phép chiếu để loại bỏ đối tượng chuyển động, bị lỗi
Công cụ trộn hình
Chỉ chỉnh sửa vùng chọn mong muốn trên ảnh trực giao và trộn hình trong thời gian thực để cải thiện ảnh trực giao trong thời gian ngắn
Chọn phép chiếu theo mặt phẳng hoặc chiếu trực giao
Chọn phép chiếu theo mặt phẳng hoặc chiếu trực giao cho từng vùng đã tạo để xóa loại bỏ ảnh lỗi
Công cụ tính chỉ số
Tính năng
Lợi thế
Giao diện hiệu chỉnh bức xạ ảnh
Tạo chỉ số thực vật đáng tin cậy và chính xác hơn bằng cách áp dụng các hiệu chỉnh bức xạ trên ảnh
Các loại bình đồ ảnh theo các phổ
Tạo bình đồ ảnh theo phổ chính xác và độ phân giải tối ưu cho việc lập bản đồ chỉ số thực vật cơ bản
Công cụ quản lý trên nhiều vùng
Cải thiện mức độ phân tích ảnh bằng cách quản lý và trực quan hóa các giá trị chỉ số trên mỗi khu vực
Bản đồ NDVI
Tại bản đồ chỉ số đơn phổ hoặc bản đồ NDVI dựa trên công thức có sẵn mà không cần can thiệp từ người dùng
Công cụ chỉnh sửa công thức tính chỉ số
Tạo và lưu các công thức tính chỉ số tùy chỉnh từ dữ liệu kênh phổ đầu vào và tạo bản đồ chỉ số tùy chỉnh
Quản lý lớp
Phân đoạn dữ liệu thành các lớp bằng thuật toán thống kê, tạo bản đồ chú thích vector
Chú thích theo tình trạng
Ghép thông tin dữ liệu quan sát tại hiện trường và văn phòng bằng cách gán chú thích dựa trên quyết định
Xuất bản đồ theo tình trạng
Đưa kết quả dữ liệu thực nghiệm và xuất bản đồ giải pháp ở định dạng .shp
Xuất dữ liệu
Tính năng
Lợi thế
Xuất kết quả 2D
– Ảnh đứng trực giao ở định dạng GeoTIFF
– Ảnh trực giao theo phép chiếu tùy chọn ở định dạng GeoTIFF
– Định dạng Google đã chia nhỏ ở định dạng .kml và .html
– Bản đồ chỉ số (Nhiệt – Thermal, DVI, NDVI, SAVI…) ở định dạng GeoTIFF và GeoJPG
– Bản đồ giải pháp ở định dạng .shp
Xuất kết quả 2.5D
– Mô hình số DSM, DTM chiếu dạng đứng ở định dạng GeoTIFF
– Mô hình DSM theo phép chiếu tùy chọn ở định dạng GeoTIFF
Xuất kết quả 3D
– Mô hình lưới 3D để chia sẻ ở dạng 3D PDF
– Mô hình lưới 3D kèm vật liệu ở dạng .obj, .ply, .dxf, .fbx
– Mô hình lưới được phân mảnh mức độ chi tiết cao (LOD) ở định dạng osgb và splk (Esri)
– Đám mây điểm ở định dạng .las, .laz, .xyz và .ply. Đường đồng mức ở định dạng shp, .dxf, .pdf
– Đám mây điểm đã phân lớp ở dạng .las và .csv
– Các đối tượng vector được người dùng số hóa ở dạng .dxf, .shp, .dgn, và kml
Hiệu ứng xem hoạt ảnh bay qua và đường bay
Xuất hoạt ảnh ở định dạng .mp4 và .avi, điểm tham chiếu bay và đường bay ở dạng .csv
Tối ưu hóa vị trí camera, tham số định hướng ngoài và tham số định hướng trong
Xuất kết quả Tam giác ảnh không gian sang phần mềm bên thứ 3 như INPHO, Leica LPS, DAT/EM Summit Evolution
Ảnh không méo
Nếu ảnh gốc được chụp bằng ống kính góc rộng, một bản sao không bị biến dạng của hình ảnh đã hiệu chỉnh sẽ được tạo
Hỗ trợ ngôn ngữ
Tính năng
Lợi thế
Tùy chọn ngôn ngữ
Anh, Tây Ban Nha, Mandarin (zh-CH, zh-TW), Nga, Đức, Pháp, Nhật, Ý và Hàn Quốc
Thông số phần cứng
Hạng mục
Thông số
CPU
Intel i7/ Xeon 4 nhân hoặc 6 nhân
GPU
Tương thích Open GL 3.2, Ram 2GB trở lên
Lưu trữ
SSD
Ram
16 GB – 60 GB
Hệ điều hành
Window 10 64bit
ĐỊA CHỈ CUNG CẤP PHẦN MỀM XỬ LÝ ẢNH UAV PIX4Dmapper CHÍNH HÃNG
Phần mềm xử lý ảnh UAV PIX4Dmapper đang được phân phối chính hãng tại Công ty TNHH Đất Hợp – Đơn vị phân phối chính thức phần mềm đến từ thương hiệu PIX4D tại Việt Nam. Mua phần mềm đo đạc tại Đất Hợp, bạn sẽ được:
Đảm bảo nhận được phần mềm chính hãng, được cập nhật tính năng liên tục.
Hỗ trợ tư vấn tận tình trước, trong và sau khi mua hàng.
Cam kết hỗ trợ kỹ thuật 24/7 khi khách hàng có nhu cầu.
Chế độ bảo hành chính hãng, an tâm cho người sử dụng.
LIÊN HỆ HOTLINE 0903 825 125 ĐỂ ĐƯỢC TƯ VẤN CHI TIẾT MIỄN PHÍ VÀ ĐẶT MUA PHẦN MỀM XỬ LÝ ẢNH UAV PIX4Dmapper NGAY HÔM NAY!











Đánh giá
Chưa có đánh giá nào.