
Mục đích cơ bản của LiDAR và RADAR là giống nhau – phát hiện sự hiện diện và khối lượng của các vật thể ở xa. Tuy nhiên chúng vẫn có những khác biệt đáng kể về: Nguyên lý hoạt động, bước sóng và dữ liệu thu thập. Thông tin chi tiết hơn sẽ được Đất Hợp trình bày qua bài viết dưới đây.
LiDAR và RADAR là gì?
Tên đầy đủ của LiDAR là Light Detection And Ranging, còn RADAR là Radio Detection And Ranging. Mặc dù mục đích cơ bản của LiDAR và RADAR là giống nhau – phát hiện sự hiện diện và khối lượng của các vật thể ở xa. Tuy nhiên chúng vẫn có những khác biệt đáng kể.
Nguyên lý hoạt động của LiDAR và RADAR
LiDAR là một công nghệ viễn thám dựa trên ánh sáng. Trong trường hợp của Yellowscan, ý tưởng đằng sau LiDAR khá đơn giản: Hướng một chùm tia laser hồng ngoại nhỏ vào một bề mặt và đo thời gian cần thiết để tia laser quay trở lại nguồn của nó. Bằng cách có LiDAR với góc nhìn 360° (ví dụ: sử dụng gương xoay), có thể thu được một đám mây điểm của môi trường. Sau đó, một phần mềm cụ thể tạo ra hình ảnh 3D tái tạo hình dạng xung quanh LiDAR với vị trí chính xác trong không gian.
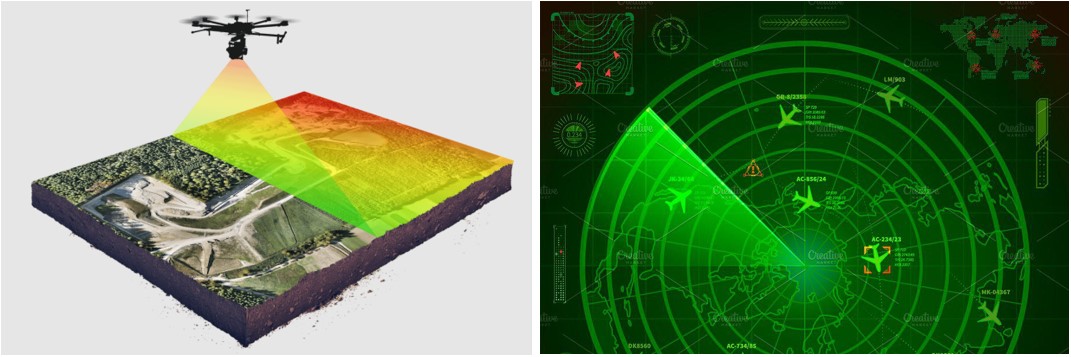
Hình 1. LiDAR và RADAR.
Hệ thống RADAR hoạt động theo cách tương tự như LiDAR, với sự khác biệt lớn là nó sử dụng sóng vô tuyến thay vì laser hoặc ánh sáng LED. Nó truyền sóng vô tuyến từ một ăng-ten quay hoặc cố định và đo thời gian bay của tín hiệu phản xạ.
>> Xem thêm: Cảm biến LiDAR của YellowScan (P1: Dòng cảm biến Livox)
LiDAR và RADAR có gì khác nhau?
– Bước sóng của LiDAR và RADAR
Bước sóng của RADAR là từ 30 cm đến 3 mm, trong khi LiDAR có bước sóng trong phạm vi micromet (Yellowscan LiDARs hoạt động ở 903 và 905 nm). Với bước sóng của mình, RADAR có thể phát hiện các đối tượng ở khoảng cách xa và xuyên qua sương mù hoặc mây. Nhưng độ phân giải bên của nó bị giới hạn bởi kích thước của ăng-ten. Độ phân giải của RADAR tiêu chuẩn là vài mét ở khoảng cách 100 mét.
LiDAR là một giải pháp nhỏ gọn cho phép lập bản đồ 3D ở mức độ chính xác cao . Ở khoảng cách 100 mét, hệ thống Yellowscan LiDAR có độ phân giải vài cm. Đây là lý do tại sao LiDAR được sử dụng để đo độ cao bằng laser và lập bản đồ. Mặt khác, RADAR được sử dụng cho các hệ thống chống va chạm máy bay, kiểm soát không lưu hoặc Radar thiên văn học.
– Dữ liệu thu thập của LiDAR và RADAR
- Dữ liệu RADAR
Dữ liệu từ radar quét. Hình trên là video hiện trường và hình dưới là dữ liệu radar, với các vị trí tương ứng được đánh dấu. Độ sáng cho biết cường độ trở lại. Xe A ở gần và ở trung tâm của radar quay trở lại (hình ảnh video không mở rộng về bên phải như radar); B là xa hơn và về bên trái; C xa hơn một chút và hầu như không thể nhìn thấy phía trên nóc của A; D xa hơn rất nhiều và có phương giữa A và B.
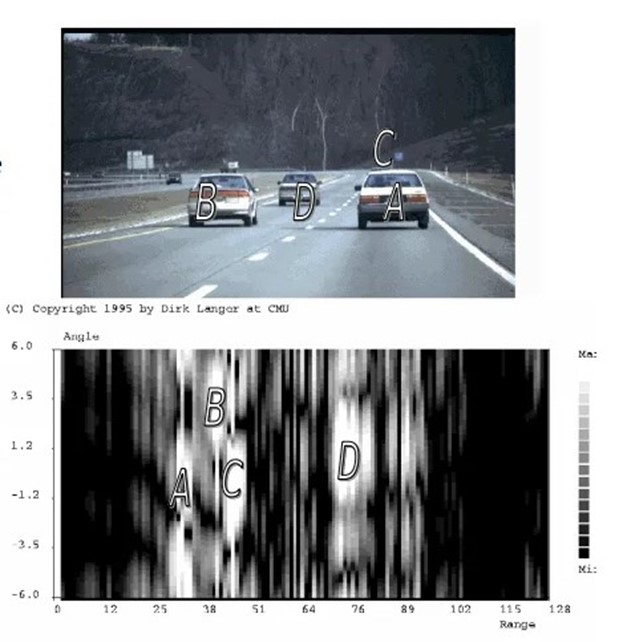
Hình 2. Dữ liệu Radar và hình ảnh thực.
- Dữ liệu LiDAR
Dữ liệu từ Yellowscan LiDAR. Hình ảnh là một đám mây điểm được tạo ra bằng Yellowscan Vx-20 ở Nhật Bản, từ một chuyến bay AGL (Above Ground Level) 80m.
Hình ảnh phái trên được tô màu theo chiều cao với hiệu ứng đổ bóng (Eye Dome Lighting). Các đối tượng tốt được xác định rõ ràng.
Hình ảnh dưới cùng được tô màu bởi giá trị RGB được lấy từ máy ảnh được đồng bộ hóa với LiDAR. Mỗi điểm LiDAR được gán cho một giá trị màu được lấy từ trực quan. Kết quả xuất ra là một hình ảnh 3D sống động.

Hình 3. Dữ liệu LiDAR và hình ảnh thực.
Bài viết này đã giúp bạn thấy được sự khác nhau giữa LiDAR và RADAR. Nếu có thắc mắc cần về LiDAR và RADAR cần giải đáp, vui lòng liên hệ đến Hotline 0903 825 125 để được hỗ trợ nhanh nhất!
>> Xem thêm: HÌNH DẠNG VÙNG QUÉT CỦA CÁC CẢM BIẾN LiDAR
Nguồn tham khảo: XEM TẠI ĐÂY.
Mọi thông tin xin vui lòng liên hệ:

CÔNG TY TNHH ĐẤT HỢP
Địa chỉ: Số 2, Đường số 4, Khu nhà ở Vạn Phúc 1, P. Hiệp Bình Phước, TP. Thủ Đức, TP. HCM
Tel: (028).3.6208.606
Mobile: 0903 825 125
Email: cskh@dathop.com.vn
Website: https://dathop.com/ – https://dathop.com.vn/
Fanpage: https://www.facebook.com/congtydathop




