![[HD] Sử dụng PIX4Dmapper để thành lập bản đồ 3D một cách tối ưu](https://dathop.com/wp-content/uploads/2022/09/phan-mem-pix4dmapper-thanh-lap-ban-do-3d.jpg)
PIX4Dmapper là một phần mềm xử lý ảnh UAV đến từ Thụy Sĩ, có khả năng xử lý dữ liệu ảnh được thu thập bởi các thiết bị bay không người lái (UAV) hoặc các hình ảnh khác được chụp từ nhiều góc độ khác nhau. Dữ liệu sau khi được phần mềm PIX4Dmapper xử lý là tài nguyên hữu ích cho công tác thành lập bản đồ, đặc biệt là bản đồ 3D. Do đó, bài viết này sẽ giúp bạn đọc tìm hiểu về cách sử dụng PIX4Dmapper để thành lập bản đồ 3D một cách tối ưu đơn giản mà hiệu quả. Hãy cùng theo dõi nhé!
Bước 1: Nhập tất cả dữ liệu hình ảnh sau khi thu thập vào PIX4Dmapper
Khi hạ cánh, nhập tất cả các ảnh được chụp vào máy tính. Tải phần mềm hỗ trợ sử dụng miễn phí hoặc mua phần mềm Pix4D. Mở và chọn “New Project” để tạo một sự án mới, đặt tên cho dự án và chọn vị trí bạn muốn lưu trữ dự án.
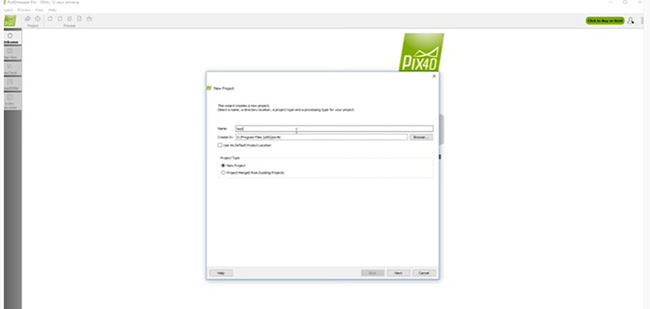
Hình 1. Giao diện tạo dự án trên Pix4Dmapper.
Import (Nhập) tất cả hình ảnh bay chụp của UAV đã nhận từ ứng dụng Pix4Dcapture vào phần mềm.
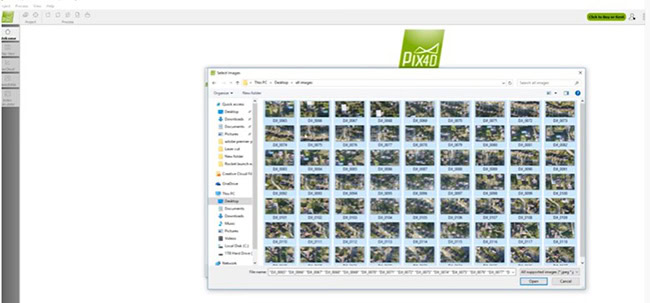
Hình 2. Import toàn bộ hình ảnh bay chụp.
Bạn có thể thấy, tất cả hình ảnh sau khi được phần mềm tiếp nhận đã được định vị địa lý một cách chính xác.

Hình 3. Vị trí địa lý của ảnh chụp.
Bước 2: Thực hiện các thao tác xử lý dữ liệu đã nhập
Ở vị trí phía dưới của giao diện xử lý công việc trên PIX4Dmapper sẽ là khu vực tùy chọn xử lý. Các bước thao tác này bao gồm các tùy chọn:
– Xử lý tương đối (Intital Procesing)
Trong bước này, hình ảnh và các dữ liệu bổ sung GCP được mô tả dữ liệu đầu vào và dữ liệu đầu ra sẽ được sử dụng để thực hiện các tác vụ sau:
- Trích xuất điểm đặc trưng: Xác định các đối tượng địa lý cụ thể làm điểm đặc trưng trong hình ảnh.
- Đối chiếu các điểm đặc trưng: Tìm những hình ảnh có cùng điểm đặc trưng và đối chiếu chúng.
- Tối ưu hóa ảnh: Hiệu chỉnh thông số định hướng bên trong (tiêu cự,…) và định hướng bên ngoài (hướng, …) của ảnh.
- Vị trí địa lý GPS / GCP: Xác định vị trí bản đồ đầu ra từ những dữ liệu địa lý đã được cung cấp.
Điểm đặc trưng tự động của ảnh được tạo ra trong bước này. Đây là cơ sở cho các bước xử lý tiếp theo.
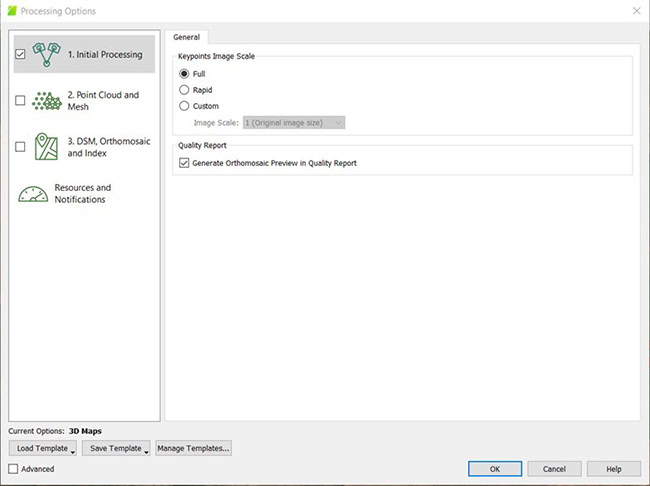
Hình 4. Giao diện Xử lý tương đối.
– Tạo dữ liệu đám mây điểm và mô hình lưới (Point Cloud and Mesh)
Bước này sẽ xây dựng mô hình đám mây điểm dựa trên điểm đặc trưng với:
- Mật độ điểm: Các điểm đặc trưng bổ sung được tạo dựa trên các điểm đặc trưng tự động, và kết quả xuất ra là một mô hình mật độ đám mây điểm.
- Mô hình lưới 3D: Dựa trên kết cấu của đám mây điểm dày đặc, có thể tạo nên mô hình lưới 3D.
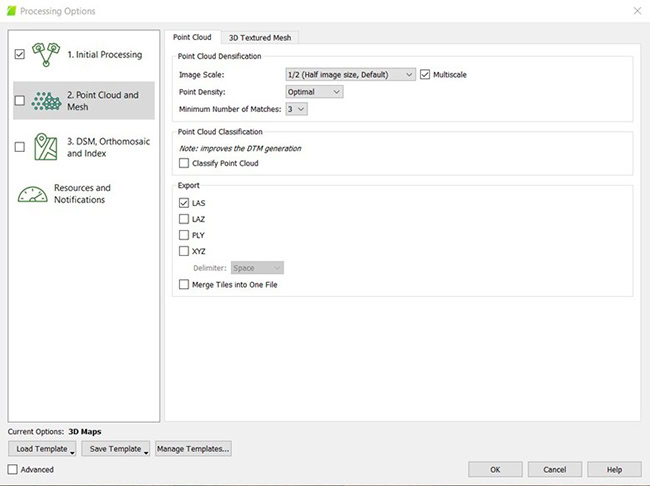
Hình 5. Giao diện Xử lý Dữ liệu Đám mây điểm và lưới.
– Tạo mô hình kỹ thuật số bề mặt – Ảnh trực giao – Chỉ số (DSM, orthomosaic and index)
Bước này cho phép tạo:
- Mô hình bề mặt kỹ thuật số (DSM): Việc tạo ra mô hình DSM sẽ cho phép người sử dụng tính toán khối lượng, tạo ảnh trực giao và tạo bình đồ theo phổ.
- Ảnh trực giao: Việc tạo ra ảnh trực giao và mảng ảnh trực giao dựa trên sự chính xác hóa. Phương pháp này loại bỏ các biến dạng phối cảnh khỏi hình ảnh.
- Bình đồ: Mục đích là tạo ra một bản đồ trong đó giá trị của mỗi Pixel chỉ ra một cách trung thực khả năng phản ánh của đối tượng.
- Bản đồ chỉ số: Tạo bản đồ chỉ số, trong đó màu của mỗi Pixel được tính bằng công thức kết hợp các dải quang phổ khác nhau.
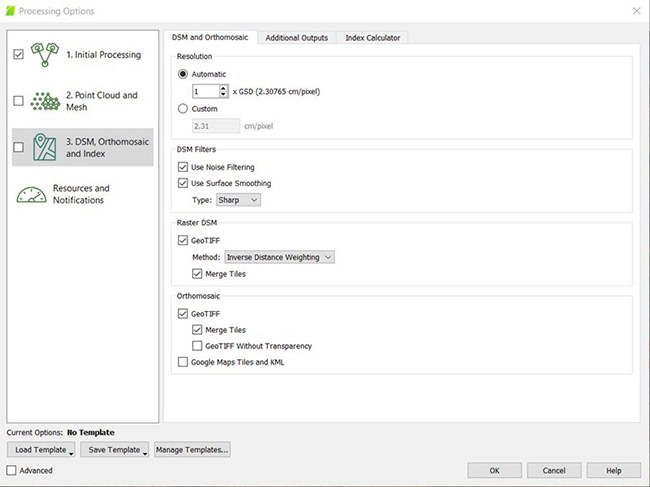
Hình 6. Giao diện xử lý Mô hình kỹ thuật số bề mặt – Ảnh trực giao – Chỉ số.
Lưu ý:
- Nếu quá trình xử lý không hoạt động (khi tạo dữ liệu đám mây điểm và lưới), hãy thay đổi tùy chọn chất lượng dữ liệu đầu ra, khởi động lại và quá trình xử lý sẽ bắt đầu lại.
- Quá trình này có thể sẽ kéo dài, nhà sản xuất khuyến cáo người sử dụng chạy quá trình xử lý này trên máy tính có cấu hình mạnh với RAM lớn vì nó sẽ quyết định rằng bao nhiêu tấm ảnh có thể được xử lý. Ở bản hướng dẫn này. Nhà sản xuất có 8GB và giới hạn khoảng 100 ảnh.
Một khi quá trình xử lý kết thúc, giao diện phần mềm sẽ giống như hình 7.
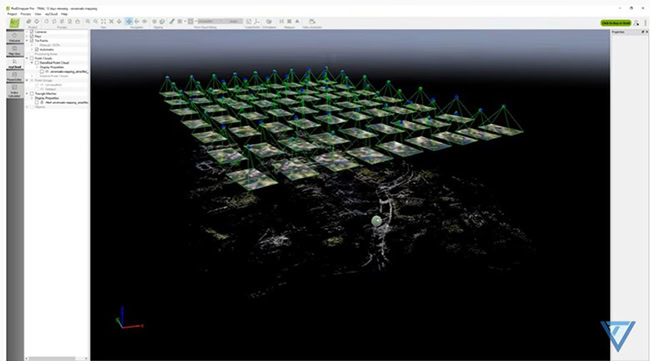
Hình 7. Giao diện kết quả xử lý ảnh bay chụp.
Để nhìn lại kết quả cuối cùng, tắt “Cameras” và kích hoạt Lưới (Triangle Meshes).
- Chất lượng của lưới phụ thuộc vào thời gian bay, độ cao bay và chất lượng được người sử dụng cài đặt.
- Bạn cũng có thể xem được Mô hình số độ cao từ dữ liệu sau khi đã được xử lý với PIX4Dmapper.
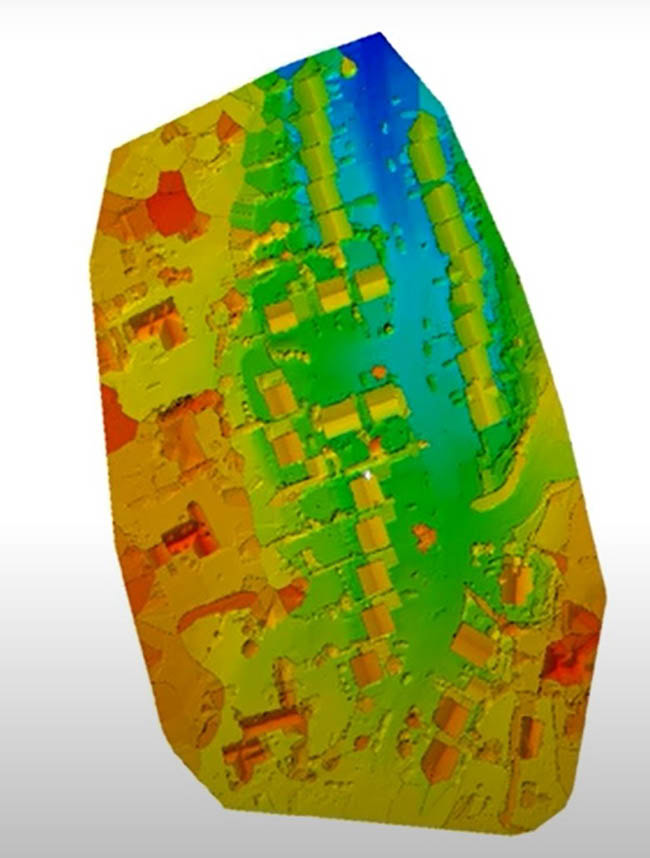
Hình 8. Mô hình số độ cao.
Phần mềm PIX4Dmapper giúp quá trình thành lập bản đồ 3D trở nên đơn giản hơn bao giờ hết. Để tìm hiểu thêm về phần mềm này, bạn đừng ngần ngại liên hệ đến Đất Hợp qua HOTLINE 0903 825 125 để được hỗ trợ nhanh nhất!
>>> Xem chi tiết: Phần mềm xử lý ảnh UAV PIX4Dmapper
Mọi thông tin xin vui lòng liên hệ:

CÔNG TY TNHH ĐẤT HỢP
Địa chỉ: Số 2, Đường số 4, Khu nhà ở Vạn Phúc 1, P. Hiệp Bình Phước, TP. Thủ Đức, TP. HCM
Tel: (028).3.6208.606
Mobile: 0903 825 125
Email: cskh@dathop.com.vn
Website: https://dathop.com/ – https://dathop.com.vn/
Fanpage: https://www.facebook.com/congtydathop




