

Sử dụng máy đo RTK bù nghiêng là một trong những cách hiệu quả giúp bạn nâng cao hiệu suất và chất lượng của dữ liệu thu thập trong đo đạc. Hãy cùng Đất Hợp tìm hiểu sâu hơn về nguyên lý hoạt động, thuật toán sử dụng và ưu điểm của máy đo RTK bù nghiêng qua bài viết dưới đây.
Tính năng bù nghiêng trên máy đo RTK là gì?
– Đo bù nghiêng là gì?
Đo nghiêng (hay đo bù nghiêng) là một tính năng quan trọng được tích hợp trên máy đo RTK (hay máy định vị GNSS RTK). Khi kích hoạt tính năng này, người dùng có thể thu thập tọa độ điểm với độ chính xác đạt cấp độ cen-ti-mét mà không cần dựng thẳng sào máy. Đây là một tính năng nổi bật, sử dụng các công nghệ bù nghiêng hiện đại và được xem là cần thiết cho các dòng máy đo RTK sau này.
– Nguyên lý hoạt động của tính năng đo bù nghiêng trong máy đo RTK:
Thông thường, khi khảo sát, người dùng phải để sào máy thẳng đứng, vuông góc với mặt phẳng Trái Đất để máy đo RTK thu thập được tọa độ X,Y chính xác. Còn cao độ Z thì chỉ cần lấy cao độ hiện tại máy thu thập được trừ đi chiều cao sào.
Vậy khi sào máy nghiêng, máy đo RTK chỉ có thể tính toán được tọa độ tại vị trí của đầu máy, làm sao để biết được tọa độ điểm tại chân máy? Câu trả lời là cảm biến IMU tích hợp bên trong máy và thuật toán được cài đặt sẵn trong main.
– Vai trò của cảm biến IMU trong đo bù nghiêng:
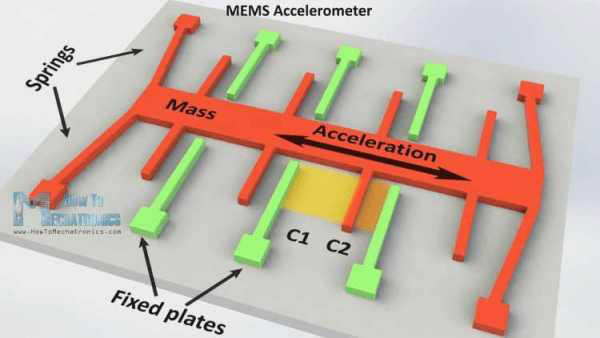
IMU (viết tắt của Inertial Measurement Unit) – là một cảm biến được tích hợp bên trong máy đo RTK (Hoặc hầu hết các thiết bị điện tử) nhằm đo lường quán tính, gia tốc, tốc độ, góc nghiêng của thiết bị so với trục vuông góc với bề mặt Trái Đất.
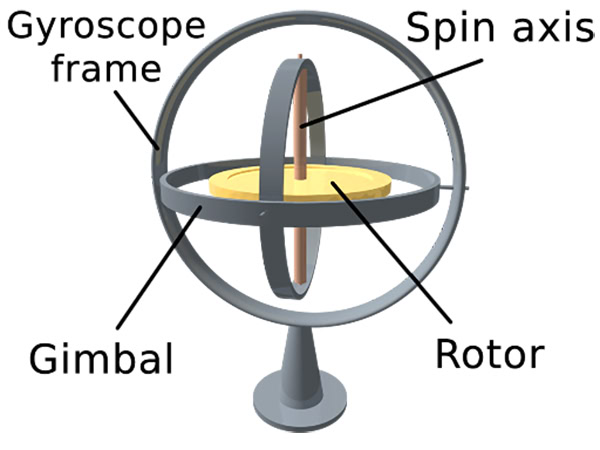
Hai thành phần chính cấu tạo nên cảm biến IMU là:
| STT | Tên thành phần cấu tạo nên cảm biến IMU | Chức năng |
|---|---|---|
| 1 | Gia tốc kế
|
Dùng để đo gia tốc của bản thân cảm biến IMU, thường gồm 2 hoặc 3 trục, ứng với 3 chiều không gian. |
| 2 | Con quay hồi chuyển
|
Dùng để đo tốc độ quay quanh một trục của cảm biến IMU, cũng như góc nghiêng của IMU so với trục vuông góc với mặt phẳng Trái Đất. |
Nhờ vào cảm biến IMU, máy đo RTK bù nghiêng có thể xác định được 2 yếu tố là góc nghiêng và hướng nghiêng của sào máy so với trục thẳng đứng. Kết hợp với chiều cao sào, máy đo RTK bù nghiêng (hay máy định vị GNSS RTK bù nghiêng) có thể biết được vị trí của nó so với điểm cần đo.
Các thuật toán được cài đặt trong bộ vi xử lý của máy đo RTK bù nghiêng
Để có thể tính toán tọa độ điểm cần đo một cách chính xác sẽ dựa vào 2 yếu tố chính:
- Góc nghiêng.
- Hướng nghiêng.
Hiện nay, tùy theo hãng sản xuất mà các máy đo RTK bù nghiêng khác nhau sẽ có những thuật toán bù nghiêng của riêng mình để cho ra kết quả chính xác nhất. Đối với Trimble, đó là công nghệ Trimble Inertial Platform (TIP) được tích hợp với công nghệ Trimble ProPoint GNSS mang lại hiệu suất đo mạnh mẽ và độ chính xác cao. Và công nghệ này đang được trang bị trên dòng máy GNSS RTK Trimble R12i.
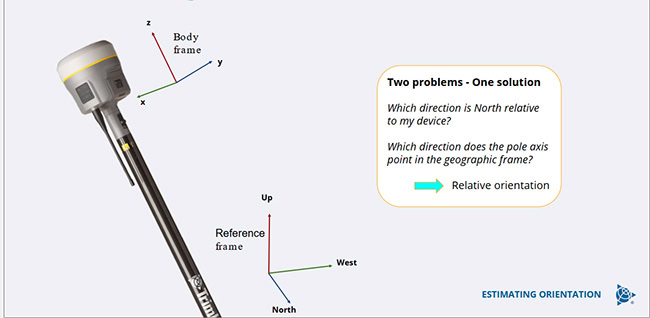
Hình 1. Bài toán về hiệu chỉnh hệ tọa độ trên máy đo RTK bù nghiêng Trimble R12i.
Công nghệ Trimble Inertial Platform dựa trên việc giải quyết hai bài toán chính để tìm ra tọa độ một cách chính xác như sau:
- Bài toán 1: Hướng nào là hướng Bắc thật so với thiết bị?
- Bài toán 2: Trục cực chỉ hướng nào trong khung địa lý?
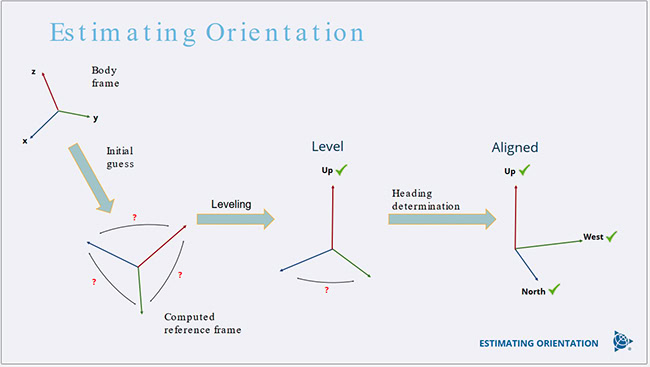
Hình 2. Workflow quá trình tìm ra tọa độ chính xác của thuật toán TIP.
Từ hai bài toán trên sẽ tiến hành định hướng tương đối để tính toán đưa từ hệ tọa độ của thiết bị (Body frame) về đúng hệ tọa độ tham chiếu (Reference frame).
Bài toán hiệu chỉnh về khung tọa độ sẽ được thực hiện như sau:
Từ hệ tọa độ ban đầu của thiết bị (Body Frame) máy sẽ tiến hành dự đoán hệ tọa độ tham chiếu ban đầu để tính ra các gia số tương ứng với cao độ, hướng Bắc, hướng Đông của hệ tọa độ tham chiếu.
Sau khi đã có kết quả tính toán (Computed reference frame), tiến hành thuật toán để hiệu chỉnh về trục Z (Up) (thuật toán Leveling). Sau khi đã xác định được trục Z, thuật toán sẽ tiếp tục xác định hiệu chỉnh để đưa về chính xác trục X (North/South) và trục Y (West/East) (Thuật toán Heading determination). Cuối cùng là quá trình căn chỉnh hệ tọa độ chính xác (Aligned).
Ưu điểm khi sử dụng máy đo RTK bù nghiêng
Khi sử dụng thiết bị GNSS RTK có tính năng bù nghiêng đặc biệt là các dòng máy đo RTK tích hợp công nghệ bù nghiêng của Trimble, người dùng sẽ đạt được hiệu suất đo vượt trội như:
- Thực hiện đo đạc những điểm tọa độ chính xác ở những khu vực không thể để thẳng sào như hàng rào, tường nhà, gốc cây.
- Cải thiện thời gian thi công một cách đáng kể khi không cần phải cân bằng bọt thủy hay bọt thuỷ điện tử.
- Đảm bảo an toàn hơn cho người vận hành sử dụng khi không cần thiết phải di chuyển chính xác đến những điểm cần đo.

Hình 3. Máy định vị GNSS RTK Trimble R12i kết hợp cùng công nghệ TIP giúp đạt hiệu suất đo mạnh mẽ, chính xác.
Các dòng máy đo RTK bù nghiêng của hãng Trimble cho phép người sử dụng nâng cao hiệu suất làm việc đến 30% so với các dòng máy đo RTK thông thường. Để được tư vấn chi tiết hơn về công nghệ bù nghiêng Trimble TIP cũng như máy đo RTK bù nghiêng của hãng này, bạn hãy liên hệ ngay Đất Hợp qua HOTLINE 0903 825 125, chúng tôi sẽ hỗ trợ nhanh nhất!
>>> Xem thêm: Bộ thu GNSS Trimble R12i kết hợp bù nghiêng mạnh mẽ để tăng năng suất cho người khảo sát




