

Nông nghiệp và canh tác hiện đại đòi hỏi phải theo dõi thảm thực vật kịp thời để ước tính điều kiện cây trồng, tăng năng suất và ứng phó kịp thời với biến đổi khí hậu. Thiết bị giám sát tại hiện trường thông thường khá hữu ích, tuy nhiên đối với khu vực rộng lớn chỉ có thể hiệu quả bằng nghiên cứu kỹ thuật viễn thám.
Nhu cầu sử dụng công nghệ viễn thám trong nông nghiệp và canh tác hiện đại
Sự phát triển của kỹ thuật viễn thám cho phép đánh giá quy mô của thực vật hoang dã và cây trồng. Viễn thám Laser là một kỹ thuật tiên tiến được phát minh vào những năm 1960. Tuy nhiên các thiết bị viễn thám Laser khá nặng nên phải lắp đặt trên máy bay hoặc trực thăng có người lái. Điều này đã làm giảm khả năng ứng dụng LiDAR vào nghiên cứu tán rừng và các ứng dụng trong nông nghiệp chính xác.
Ngày nay UAV hiện đại có thể mang được trọng lượng vài kg và nhỏ gọn, tiêu thụ ít điện năng. Kỹ thuật viễn thám bao gồm vệ tinh và UAV với các cảm biến laser, camera đa phổ, siêu phổ, rất hiệu quả đối với nông nghiệp và canh tác chính xác. Tuy nhiên, cảm biến LiDAR mang lại hiệu quả hơn so với các cảm biến hình ảnh đa phổ ở chỗ không cần hiệu chuẩn chính xác trước mỗi phép đo và điều kiện ánh sáng mặt trời ít bị ảnh hưởng hơn các phép đo khác.
LiDAR Drone được ứng dụng trong nông nghiệp và canh tác hiện đại như thế nào?
Các cảm biến LiDAR đầu tiên được sử dụng trên UAV để thu thập dữ liệu Point Cloud 3D của những khu vực trồng cây, cánh đồng và rừng. Dữ liệu LiDAR có thể chẩn đoán các thời kỳ sinh trưởng khác nhau của cây trồng. Một tháng, hai tháng sau khi trồng và một tuần trước khi thu hoạch. Đầu tiên, đo quang phổ huỳnh quang bằng Laser các bộ phận khác nhau của cây ngô ở khoảng cách 2m. Những lá khỏe có cường độ huỳnh quang thấp và những lá hư hại có cường độ huỳnh quang cao nhất.
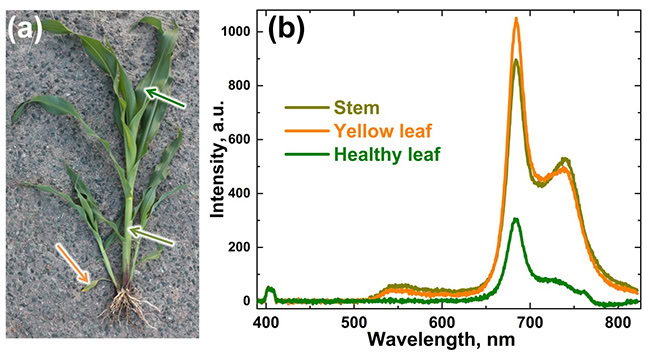
Hình 1. Hình a. Chỉ các thành của cây ngô cần đo laser. Hình b. Phổ huỳnh quang thể hiện trên các thành phần khác nhau của cây ngô.
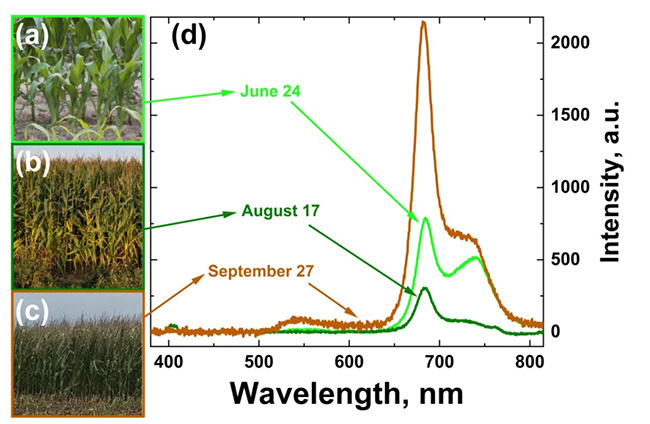
Hình 2. Hình ảnh khu trồng ngô qua các thời kỳ tăng trưởng thực (phát triển lá, ra hoa và ra quả) và các giá trị huỳnh quang của ngô ở các thời kỳ được thể hiện trong hình d.
Như vậy, một LiDAR huỳnh quang nhỏ gọn đã được lắp trên UAV công nghiệp (Drone Enterprise) để lập bản đồ cánh đồng ngô qua các thời kỳ phát triển khác nhau. Dữ liệu quang phổ được xử lý ở các dải huỳnh quang 680nm và 740nm. Tỷ lệ 680/740nm được chứng minh cho thấy là chỉ số tốt để thể hiện tình trạng nguy kịch của thực vật.
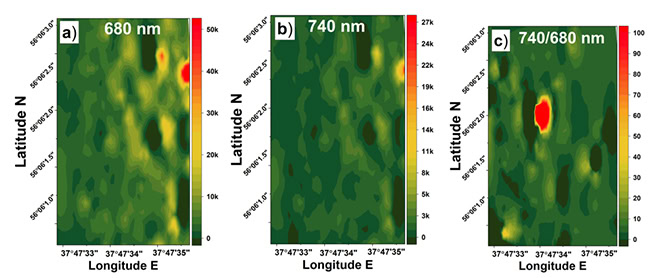
Hình 3. Hình a. Bản đồ dải huỳnh quang 680nm; Hình b. Bản đồ dải huỳnh quang 780nm; Hình c. Bản đồ dải huỳnh quang ở tỷ lệ 680/740nm.
Các bản đồ tín hiệu huỳnh quang thu được đã cho thấy diệp lục không đồng đều ở thời kỳ cây ngô phát triển tán và có xu hướng tăng lên khi diện tích lá lớn hơn. Nhìn chung, tín hiệu chất diệp lục có xu hướng tăng lên trong suất thời kỳ sinh trưởng của thực vật. Các chỗ tăng tín hiệu diệp lục cũng được thể hiện rõ trên bản đồ thu được và cũng thể hiện được các chỗ có thực vật đang bị nguy hại do sử dụng thuốc diệt cỏ quá mức. Các thử nghiệm trên đã chứng minh LiDAR hoàn toàn khả thi và nhiều triển vọng để phát hiện và định vị những nơi mà thực vật đang gặp nguy hại.
>>> Xem thêm: Sử dụng UAV LiDAR khảo sát nông nghiệp để lập bản đồ trồng trọt
Tham khảo:
2. https://www.mdpi.com/2304-6732/9/12/963/html
Key: Agriculture; Airborne LiDAR; Environmental; Forestry; Mapping; point clouds; precision agriculture; Remote Sensing; Research; UAS; UAV; visualization;Geospatial Professionals laser remote sensing; LIDAR; laser-induced fluorescence; unmanned aircraft vehicles; maize in vivo sensing




