
Máy định vị GNSS kết hợp thiết bị bay không người lái (UAV) qua phương pháp nắn chỉnh tâm ảnh, cụ thể là: Phương pháp điểm khống chế mặt đất (GCP), Phương pháp đo động thời gian thực (RTK) và Phương pháp đo động hậu xử lý (PPK). Đặc điểm và ứng dụng cụ thể của mỗi phương pháp như thế nào?
Sự phát triển của công nghệ bay không người lái
Ngày nay, sự phát triển và ứng dụng các thiết bị bay không người lái trong lĩnh vực khảo sát, đo đạc, và thành lập bản đồ ngày càng rộng rãi. Việc ứng dụng công nghệ đo vẽ ảnh bay chụp từ thiết bị này có ưu điểm là rút ngắn thời gian, tiết kiệm nhân công, chi phí, cơ chế vận hành và đảm bảo độ chính xác.
Tùy theo nhu cầu, các loại thiết bị bay ngày càng được trang bị công nghệ tiên tiến như DJI Phantom 4 RTK (loại thiết bị bay tích hợp mô đun định vị RTK được sử dụng khá nhiều trên thị trường hiện nay), thuật toán xử lý phần mềm ngày càng được tối ưu và sản phẩm ngày càng đa dạng: Ảnh trực giao (Orthophoto), mô hình DEM, DSM, 3D Map,3D Mesh, mô hình dữ liệu Đám mây điểm Point Cloud.

Hình 1. Trọn bộ thiết bị bay không người lái DJI Phantom 4 RTK.
GNSS kết hợp thiết bị bay không người lái (UAV) qua phương pháp nắn chỉnh tâm ảnh
Để đạt được những sản phẩm chất lượng và đạt độ chính xác theo yêu cầu, việc lựa chọn phương pháp nắn chỉnh tâm ảnh trong phương pháp đo vẽ ảnh bay chụp từ thiết bị bay không người lái là yếu tố quan trọng nhất. Hiện tại, có 3 phương pháp nắn chỉnh tọa độ tâm ảnh phổ biến là:
- Phương pháp điểm khống chế mặt đất (Ground control point -GCP).
- Phương pháp đo động thời gian thực (Real Time Kinematic -RTK).
- Phương pháp đo động hậu xử lý (Post Processed Kinematic -PPK).
Các phương pháp này đều có liên quan hoặc phụ thuộc vào thiết bị định vị GNSS.
1. Phương pháp điểm khống chế mặt đất (Ground Control Point -GCP)
Điểm khống chế mặt đất hay điểm khống chế ảnh là điểm địa vật, đối tượng hoặc tiêu đo được đánh dấu rõ nét trên thực địa và bay chụp rõ nét, được đo nối xác định tọa độ và độ cao chính xác. Điểm GCP có thể được đo bằng các thiết bị như máy toàn đạc điện tử hoặc thiết bị định vị GNSS và được phân bố rải đều tùy thuộc vào diện tích khu đo.
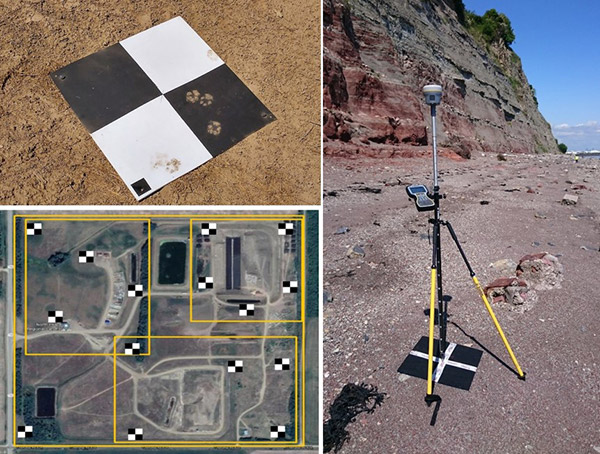
Hình 2. Các điểm khống chế mặt đất GCP và thực hiện đo điểm GCP bằng thiết bị GNSS Trimble R10.
Điểm GCP sau khi thực hiện bay chụp, được sử dụng vào mục đích bình sai khối ảnh, hiệu chỉnh tâm ảnh chính xác hoặc dùng làm điểm kiểm tra để đánh giá chất lượng sản phẩm. Kết quả xử lý dữ liệu bay chụp phụ thuộc vào độ chính xác của điểm GCP. Đây là phương pháp cơ bản và phổ biến trong xử lý ảnh bay chụp, tuy nhiên đòi hỏi sự chuẩn bị nhiều nhân lực và thiết bị để thực hiện toàn bộ quy trình đo những điểm GCP theo phương pháp này.
2. Phương pháp đo động thời gian thực (Real Time Kinematic -RTK)
Với sự phát triển ngày càng nhanh của công nghệ định vị dẫn đường, hệ thống quán tính IMU và bộ thu GNSS, các thiết bị bay không người lái hiện nay đều được trang bị mô-đun GNSS-RTK để thu và xử lý tín hiệu vệ tinh từ trạm tham chiếu mặt đất hoặc hệ thống trạm tham chiếu ảo để hiệu chỉnh, tính toán vị trí tâm ảnh chụp và vị trí máy bay chính xác tức thời trong quá trình thực hiện nhiệm vụ bay.
Dữ liệu hiệu chỉnh từ trạm tham chiếu có thể được truyền phát qua sóng Radio hoặc 3G để liên kết tới thiết bị bay. Các thiết bị GNSS Trimble có thể làm trạm tham chiếu như Trimble R8s, Trimble R9s, Trimble R10, Trimble R12/R12i và Trimble Alloy. Có thể nói đây là phương pháp hiện đại, có thể đạt độ chính xác cao, an toàn và ít tốn nhân công.

Hình 3. GNSS kết hợp thiết bị bay không người lái (UAV) – Thiết bị DJI Phantom 4 RTK với trạm tham chiếu mặt đất DRTK 2 (bên trái) và trạm tham chiếu GNSS Trimble R12i (bên phải).
>> Xem thêm: Các sản phẩm định vị GNSS RTK đến từ Trimble
3. Phương pháp đo động hậu xử lý (Post Processed Kinematic -PPK)
Phương pháp đo động hậu xử lý có thể nói gần giống với phương pháp RTK, tuy nhiên điểm khác biệt ở đây là trạm tham chiếu mặt đất sẽ không liên kết tức thời với thiết bị bay. Ở phương pháp này, trạm tham chiếu sẽ được đặt trong phạm vi bay và thu dữ liệu vệ tinh (hay còn gọi là đo GNSS tĩnh) tại thời điểm thiết bị bay thực hiện nhiệm vụ bay, nếu thiết bị bay trong khu vực có trạm tham chiếu ảo (CORS, VRS) thì có thể tải các tệp dữ liệu đo tĩnh từ các trạm này mà không cần đặt các trạm tham chiếu riêng.
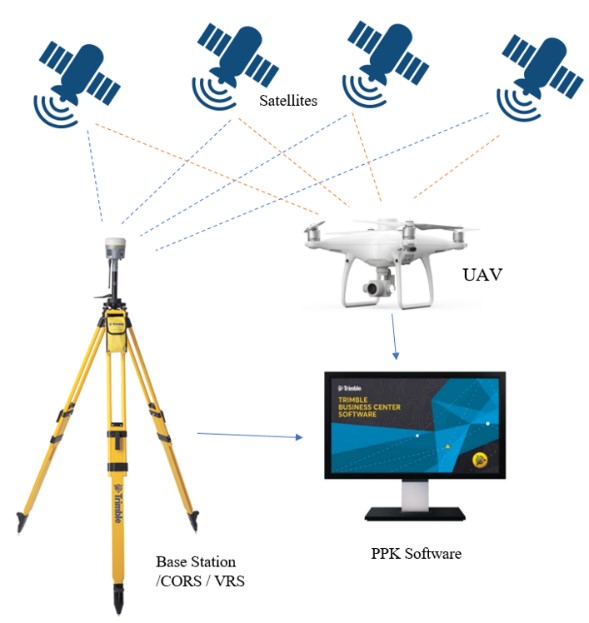
Hình 4. GNSS kết hợp thiết bị bay không người lái (UAV) – Đo động hậu xử lý Phantom 4 RTK với trạm tham chiếu Trimble R12i.
Dữ liệu đo tĩnh từ trạm tham chiếu và dữ liệu định vị thu được từ máy bay sẽ được kết hợp để xử lý nội suy trên phần mềm để tính toán vị trí tâm ảnh. Phần mềm có thể kể đến như Trimble Business Center, từ phiên bản 5.4 trở lên.
Bên cạnh việc hỗ trợ xử lý theo phương pháp GCP, RTK, giờ đây đã hỗ trợ hậu xử lý dữ liệu thiết bị bay DJI Phantom 4 RTK với dữ liệu đo tĩnh từ thiết bị định vị GNSS Trimble, hệ thống mạng lưới trạm tham chiếu ảo Trimble (tải xuống trực tiếp ngay trên phần mềm thông qua Internet) hoặc dữ liệu đo tĩnh (định dạng Rinex) của bên thứ 3, đảm bảo độ chính xác vị trí tâm ảnh ở cấp độ khảo sát.
Ứng dụng của thiết bị định vị GNSS kết hợp thiết bị bay không người lái (UAV) ngày càng nhiều. Để được tư vấn chi tiết về thiết bị bay không người lái DJI cũng như máy định vị GNSS-RTK hãng Trimble, bạn hãy liên hệ ngay đến HOTLINE 0903 825 125 để được hỗ trợ nhanh nhất!
>>> Xem thêm: Hướng dẫn sử dụng Phantom 4 RTK
Mọi thông tin xin vui lòng liên hệ:

CÔNG TY TNHH ĐẤT HỢP
Địa chỉ: Số 2, Đường số 4, Khu nhà ở Vạn Phúc 1, P. Hiệp Bình Phước, TP. Thủ Đức, TP. HCM
Tel: (028).3.6208.606
Mobile: 0903 825 125
Email: cskh@dathop.com.vn
Website: https://dathop.com/ – https://dathop.com.vn/
Fanpage: https://www.facebook.com/congtydathop




