
SLAM và LiDAR SLAM là những thuật ngữ được nhắc nhiều hơn ở các lĩnh vực đo đạc trong thời gian gần đây. Vậy cụ thể thì SLAM là gì? Và LiDAR SLAM là gì? Hãy cùng Đất Hợp tìm hiểu chi tiết hơn qua bài viết dưới đây.
SLAM là gì?
SLAM (Simultaneous Localization and Mapping) là một thuật toán mà khi được gắn trên một thiết bị nào đó cho phép thiết bị đó vạch ra bản đồ ngẫu nhiên. Người ta sẽ dựa trên thông tin của bản đồ đó để thực hiện các nhiệm vụ như lập kế hoạch đường đi và tránh chứng ngại vật. Thuật toán này thường được ứng dụng trên các thiết bị robot để tự vận hành.

Hình 1. Robot tự hành trong nhà kho, bệnh viện hoặc sân bay. (Nguồn: https://www.mathworks.com)
SLAM bắt đầu từ những năm 80 của thế kỷ 20 khi mà các kỹ sư muốn chế tạo ra những con robot để vận hành trong nhà xưởng mà không va chạm vào bất cứ chướng ngại vật nào.
Ngày nay SLAM được ứng dụng trong hàng loạt các ứng dụng trong nhà, bên ngoài, trên không và dưới nước cho cả phương tiện có người lái hoặc không có người lái.
SLAM sử dụng các thiết bị hoặc cảm biến để thu thập dữ liệu nhìn thấy được (camera) và không nhìn thấy được (RADAR, SONAR và LiDAR) với dữ liệu vị trí được thu thập cơ bản từ hệ thống IMU (Inertial Measurement Unit).
Các cảm biến cùng thu thập dữ liệu và hình ảnh từ môi trường xung quanh. Thuật toán SLAM sẽ ước tính vị trí tốt nhất từ môi trường xung quanh. Thuật toán sẽ sử dụng quy trình lặp để cải thiện vị trí được ước tính trước đó với thông tin vị trí mới. Nếu quá trình lặp càng nhiều thì vị trí càng chính xác cao. Điều này phụ thuộc vào cấu hình và khả năng xử lý song song của GPU.
LiDAR SLAM là gì?
LiDAR SLAM là công nghệ sử dụng cảm biến Laser. Chính vì tốc độ thu thập dữ liệu nhanh với độ chính xác cao, nó cho phép cảm biến LiDAR (Light detection and ranging) ứng dụng được trên các phương tiện di chuyển tốc độ cao như máy bay không người lái hay ô tô tự lái.
Dữ liệu đầu ra của LiDAR thường được gọi là dữ liệu đám mây điểm (Point Cloud) có sẵn các thông tin vị trí 2D (x,y) hoặc 3D (x,y,z). Các cảm biến Laser cung cấp các phép đo khoảng cách có độ chính xác cao và làm việc rất hiệu quả cho việc thành lập bản đồ với SLAM.
Một cách tổng quát, chuyển động được ước tính tuần tự bằng cách khớp các đám mây điểm. Quãng đường đã đi được sử dụng để tính vị trí của phương tiện. Bản đồ đám mây điểm 2D hoặc 3D được thể hiện dưới dạng bản đồ grid hoặc bản đồ voxel.
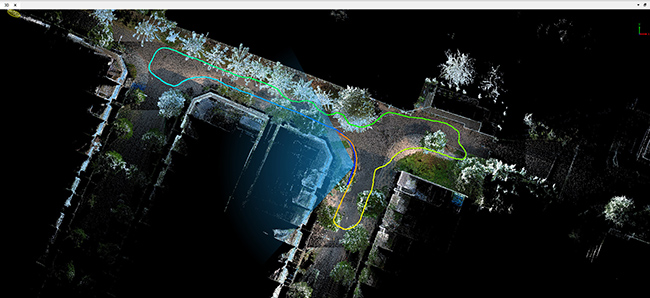
Hình 2. Kết quả 2D từ LiDAR SLAM LiGrip – Hãng Greenvalley.
Ngày nay nhiều ngành công nghiệp đã tích hợp camera toàn cảnh 360 độ với các cảm biến 3D. Điều này cho phép họ trực quan hóa công trình khảo sát (survey) hoặc kiểm tra (inspection). Dữ liệu LiDAR có thể được xử lý tô màu bằng cách sử dụng thông tin có trên ảnh toàn cảnh. Vì thế nó hiển thị đúng như quan sát tại công trình.
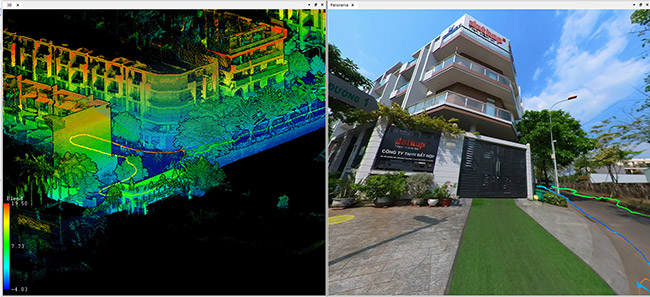
Hình 3. Kết quả 3D từ Lidar SLAM LiGrip – Hãng Greenvalley.
Nguồn tham khảo:
https://bloginnovazione.it/en/ligrip/14429/
https://gisresources.com/what-is-slam-algorithm-and-why-slam-matters/
Công nghệ LiDAR SLAM đã dần xâm nhập vào thị trường Việt Nam và có được những bước phát triển nhanh chóng. Để tìm hiểu chi tiết hơn về công nghệ này cũng như những khả năng mà nó có thể ứng dụng, hãy liên hệ ngay HOTLINE 0903 825 125, chúng tôi sẽ hỗ trợ nhanh nhất!
>>> Xem thêm: Công nghệ Scan Laser 3D được ứng dụng trong thiết kế nội – ngoại thất như thế nào?
Mọi thông tin xin vui lòng liên hệ:

CÔNG TY TNHH ĐẤT HỢP
Địa chỉ: Số 2, Đường số 4, Khu nhà ở Vạn Phúc 1, P. Hiệp Bình Phước, TP. Thủ Đức, TP. HCM
Tel: (028).3.6208.606
Mobile: 0903 825 125
Email: cskh@dathop.com.vn
Website: https://dathop.com/ – https://dathop.com.vn/
Fanpage: https://www.facebook.com/DatHopCompany




