Khi sử dụng phương pháp đo động thời gian thực RTK, nhiều người dùng gặp phải vấn đề “lỗi không đạt nghiệm Fixed” nhưng chưa biết nguyên nhân và cách khắc phục. Bài viết dưới đây Đất Hợp sẽ chia sẻ đến bạn về “Lỗi không đạt nghiệm Fixed là gì?” và “Cách khắc phục lỗi này ra sao?”. Hãy cùng theo dõi nhé!
Nhu cầu sử dụng phương pháp đo RTK trong công tác đo đạc
Ngày nay, việc ứng dụng công nghệ mới trong lĩnh vực đo đạc, thành lập bản đồ đang là xu hướng. Công nghệ đo động thời gian thực (RTK – Real-time Kinematic) là một trong những kỹ thuật mới được sử dụng để tăng độ chính xác trong hệ thống định vị toàn cầu và đang dần thay thế các công nghệ đo đạc truyền thống trong việc thành lập bản đồ.
Phương pháp đo động thời gian thực dựa trên việc sử dụng các trạm tham chiếu, bộ thu GNSS nhận tín hiệu định vị từ các hệ thống định vị vệ tinh toàn cầu và dữ liệu hiệu chỉnh thời gian thực thông qua sóng Radio hoặc Internet. Cả tín hiệu thu GNSS và dữ liệu hiệu chỉnh được thêm vào trong thuật toán để tính toán giải pháp định vị.
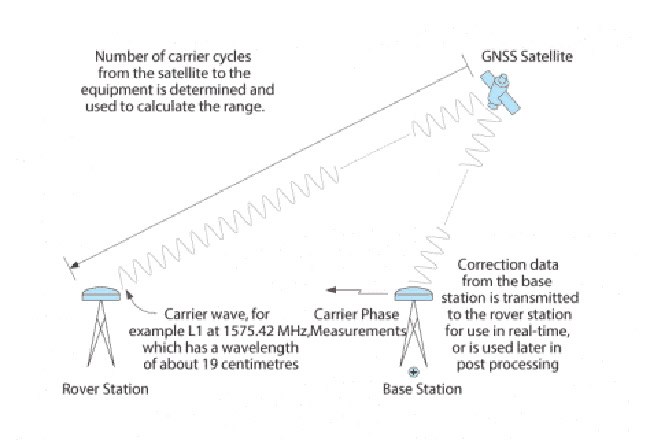
Hình 1. Minh họa công nghệ đo động thời gian thực RTK.
Quy trình xử lý GNSS để tìm nghiệm Fixed
Trong quá trình đo đạc bằng GNSS, để tính được vị trí của máy thu thì phải đo được khoảng cách từ vị trí ăng-ten thu tín hiệu vệ tinh đặt trên mặt đất tới vệ tinh ngoài không gian. Phép đo Pha sóng mang (Carier phase) được sử dụng trong trường hợp này, và được xem là phép đo chính xác hơn phép đo tín hiệu mã C/A (PRN- Pseudorandom Noise).
Khi tín hiệu pha truyền từ vệ tinh đến máy thu, phép đo ban đầu chỉ giải được một phần nhỏ của pha, phạm vi thực tế từ vệ tinh và máy thu là tổng của phần đo được này và phần chưa biết của toàn bộ bước sóng. Số bước sóng chưa biết được gọi là “trị nhọc nhằng” hay còn gọi là số nguyên lần N. Để đo chính xác cự ly này, thuật toán phải giải ra được tham số nguyên lần N này.
Quy trình xử lý GNSS truyền thống để tìm ra N sẽ qua hai bước riêng biệt:
- Bước 1. Nghiệm “Float” được tạo ra bằng cách sử dụng cả hai trị đo mã và trị đo pha sóng mang.
- Bước 2. Một thuật toán “vòng lặp” tìm kiếm được thực hiện để giải tìm N. Quá trình này, nếu tìm kiếm thành công sẽ cho ra nghiệm “Fixed”.
Tùy thuộc vào số lượng vệ tinh có thể thu được của bộ thu, mà người dùng có thể nhận được giải pháp định vị “Float” hoặc “Fixed” với mức độ chính xác khác nhau. Lời giải thuật toán định vị nghiệm Fixed cung cấp mức độ chính xác định vị centimet (cm), lời giải Float cho biết mức độ chính xác định vị không đạt centimet (cm) và bị ảnh hưởng bởi nhiều yếu tố.
Các yếu tố gây lỗi không đạt nghiệm Fixed có thể kể đến như: Ảnh hưởng bởi các nguồn sai số như sai số hệ thống của máy thu, sai số do ảnh hưởng bởi môi trường, tần điện ly, hiện tượng đa đường dẫn (không thông thoáng), chất lượng truyền dữ liệu hiệu chỉnh giữa trạm tham chiếu và máy thu, đường đáy quá dài, thuật toán xử lý phần mềm trên máy thu, chất lượng quá trình khởi tạo..
Làm thế nào để đạt được lời giải định vị Fixed?
Thuật toán nghiệm Fixed/Float có một số nhược điểm trong quá trình giải tìm trị số nguyên N. Một là người sử dụng không thể trích xuất vị trí nếu thuật toán chưa đạt được nghiệm Fixed. Mặt khác, sẽ có khả năng có nghiệm không chính xác, nghĩa là thuật toán xử lý chọn sai trị số N trong khi N đúng lại bị loại bỏ hoàn toàn và không được chọn cho đến khi quá trình xử lý được lặp lại để tìm kiếm N ở lần lặp 2, 3..n.
Trong phép đo RTK, việc tìm ra trị N sai dẫn đến vị trí thực khác xa so với vị trí được tính toán mặc dù vẫn cho nghiệm Fixed. Điều này có thể duy trì trong vài giây cho đến khi được phát hiện bằng công cụ kiểm tra tự động. Do đó, để đảm bảo máy thu cung cấp lời giải nghiệm Fixed một cách chính xác, người sử dụng nên lưu ý những điều sau:
– Đảm bảo chất lượng quá trình khởi tạo:
Khi bắt đầu sử dụng, máy thu GNSS yêu cầu một quá trình khởi tạo (đảm bảo nhận được dữ liệu hiệu chỉnh và thu đủ tín hiệu vệ tinh), nếu quá trình này diễn ra suôn sẻ, người dùng có thể sử dụng máy thu GNSS định vị vị trí một cách chính xác (cm) và đạt được nghiệm Fixed.
– Chất lượng đường truyền dữ liệu hiệu chỉnh từ trạm tham chiếu và máy thu ổn định:
Hai phương pháp truyền dữ liệu hiệu chỉnh phổ biến nhất hiện nay là qua sóng Radio và qua Internet. Cả hai phương pháp này đều có ưu điểm và nhược điểm riêng:
- Sóng Radio sẽ đem lại mức độ ổn định cao tuy nhiên hạn chế lớn nhất là khoảng cách truyền sóng bị hạn chế, bán kính 10 km trong điều kiện lý tưởng hoặc 3-5km trong đều kiện địa hình dốc cao, địa vật cản trở.
- Phương pháp sử dụng Internet khắc phục sự hạn chế về khoảng cách truyền, có thể đạt mức lên đến 30km tuy nhiên phải đảm bảo máy thu nằm trong vùng phủ sóng internet để sử dụng.
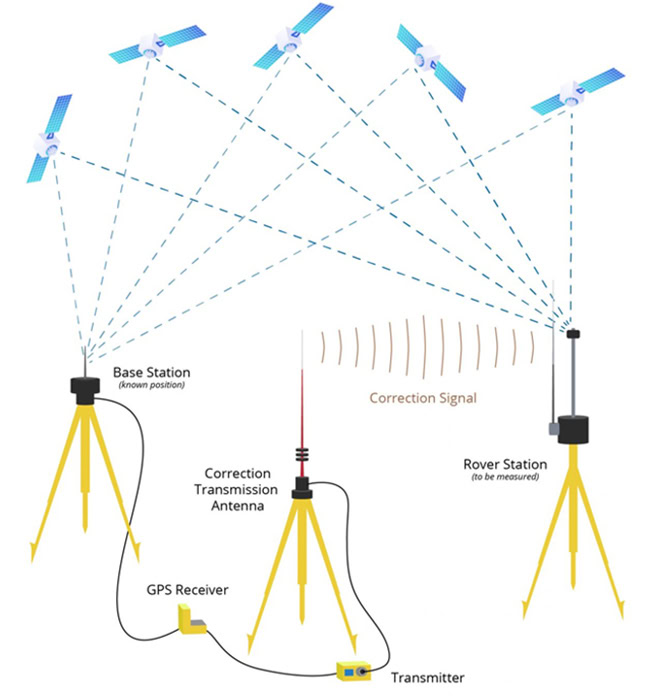
Hình 2. Cơ chế truyền dữ liệu hiệu chỉnh trong phương pháp đo RTK.
Khi chất lượng đường truyền ổn định, khả năng đạt được nghiệm Fixed cũng cao hơn.
– Hạn chế ảnh hưởng bởi điều kiện môi trường khó khăn, không thông thoáng, hiện tượng đa đường dẫn:
Việc sử dụng máy thu GNSS trong điều kiện khó khăn như cây cối che phủ, gần tòa nhà, sẽ gây ra hiện tượng đa đường dẫn – Sóng thu được bị nhiễu bởi các yếu tố trên nên máy thu có thể không thủ đủ tín hiệu từ các hệ thống vệ tinh dẫn tới không đủ dữ liệu để cung cấp cho quá trình xử lý thuật toán và không đạt nghiệm Fixed như mong muốn.
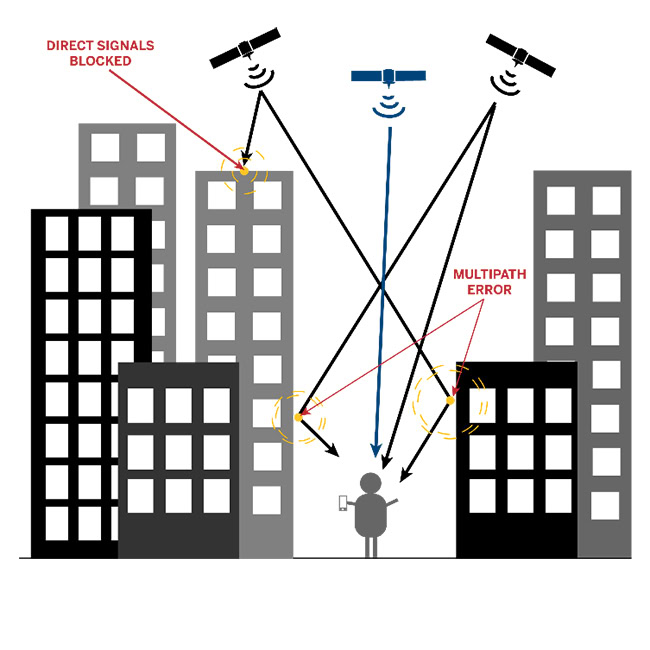
Hình 3. Hiện tượng đa đường dẫn Multipath khi sử dụng thiết bị GNSS trong điều kiện khó khăn.
– Thuật toán xử lý dữ liệu trên phần mềm và chất lượng máy thu:
Bên cạnh ảnh hưởng bởi các yếu tố trên, thuật toán xử lý và chất lượng máy thu cũng ảnh hưởng tới việc đạt lời giải định vị chính xác và đạt được nghiệm Fixed trong quá trình đo. Máy thu phải đảm bảo thu đầy đủ tín hiệu vệ tinh và thuật toán xử lý trên phần mềm phải đảm xử lý tất cả các tín hiệu, tính toán vòng lặp một cách chính xác để cho kết quả định vị chính xác và tin cậy.
Hiện nay các đời máy thu mới của hãng Trimble như: Trimble DA2, Trimble R780, Trimble R12, Trimble R12i sẽ khắc phục những nhược điểm của nghiệm Fixed/Float. Công nghệ Trimble ProPoint trên các máy thu GNSS này sẽ giúp lọc và xử lý đầy đủ tín hiệu vệ tinh, tối ưu phần cứng và phần mềm để có thể sử dụng máy thu trong điều kiện khó khăn mà vẫn đạt giải pháp định vị chính xác, tin cậy cao.

Hình 4. Thiết bị Trimble R12i – Dòng sản phẩm GNSS cao cấp nhất của hãng Trimble.
Nếu bạn còn bất kỳ thắc mắc nào về vấn đề “Lỗi không đạt nghiệm Fixed khi sử dụng phương pháp đo động thời gian thực RTK trên máy GNSS” cần giải đáp, đừng ngần ngại liên hệ với Đất Hợp qua HOTLINE 0903 825 125, chúng tôi sẽ giải đáp nhanh nhất!
>>> Xem thêm: Nguyên nhân máy định vị GNSS không bắt vệ tinh. Cách khắc phục như thế nào?
Mọi thông tin xin vui lòng liên hệ:

CÔNG TY TNHH ĐẤT HỢP
Địa chỉ: Số 2, Đường số 4, Khu nhà ở Vạn Phúc 1, P. Hiệp Bình Phước, TP. Thủ Đức, TP. HCM
Tel: (028).3.6208.606
Mobile: 0903 825 125
Email: cskh@dathop.com.vn
Website: https://dathop.com/ – https://dathop.com.vn/
Fanpage: https://www.facebook.com/DatHopCompany